Specifications
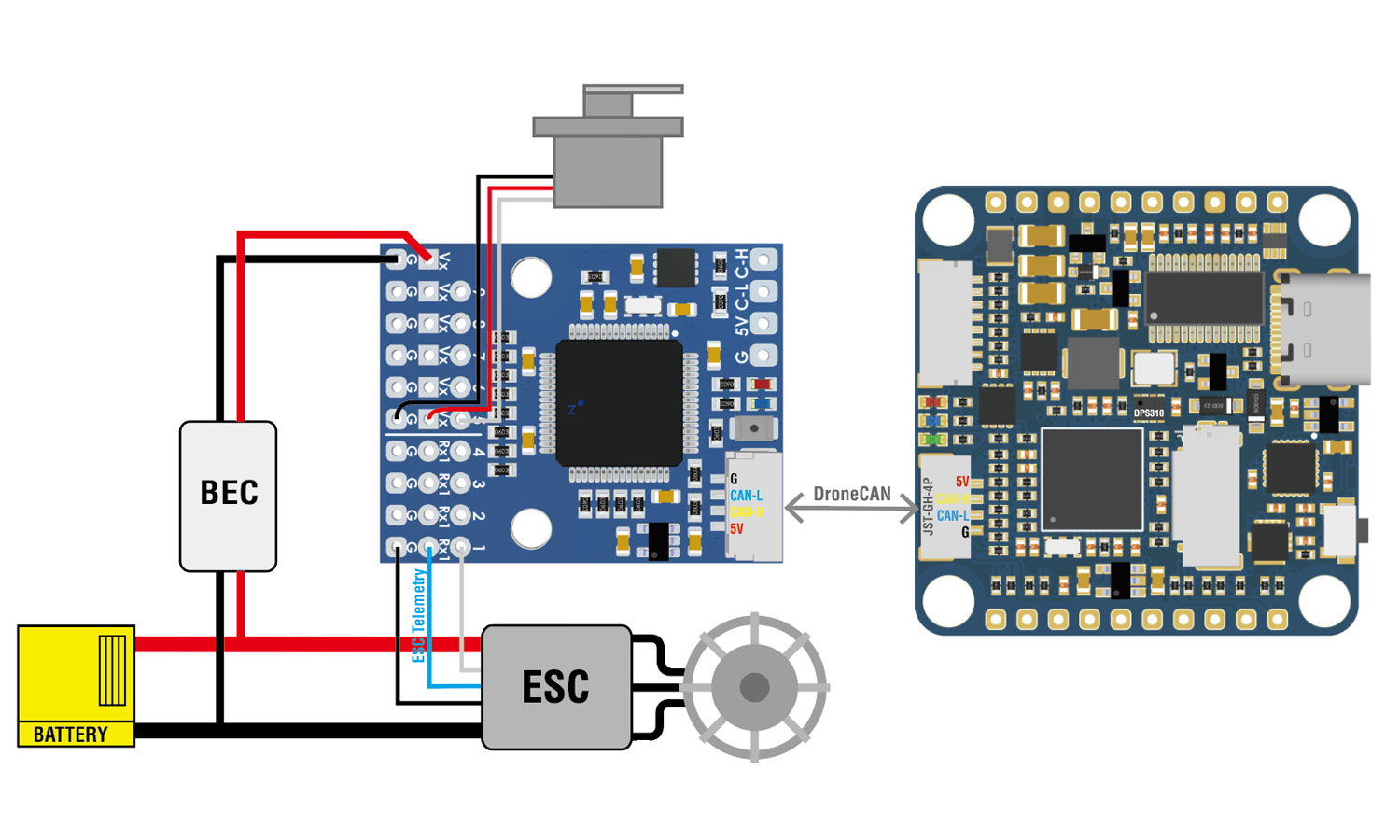
- CAN-L4-PWM is an Adapter Node based on ArudPilot AP_Periph firmware.
- Using this adapter to turn DShot capable ESCs into CAN ESCs, including full ESC telemetry. and turn PWM servos into CAN servos.
Specifications
- MCU: STM32L431xC, 256KB Flash
- 1x CAN, DroneCAN Protocol
- 9x PWM outputs (8x Dshot)
- 1.5x UARTs
- UART1, RX1
- UART3, Tx3/ Rx3
- ST debug, SWCLK & SWDIO
- LED
- Blue, Fast blinking, Booting
- Blue, Slow blinking, working
- Red, 3.3V indicator
- Input voltage range: 4.5~5.5V @5V pad/pin
- Power consumption: 30mA
- Operating Temperatures: -20~80 °C
- “Vx” pads are for powering servos via external BEC. “Vx” is not connected to other components on this board.
- “Rx1” pads are for ESC Telemetry, DO NOT connect ESC BEC output to Rx1 pad.
- Physical
- 1x JST-GH-4P(SM04B-GHS-TB) for CAN
- Board Size: 32mm*25.4mm. 3.5g
- Mounting: 20mm. Dia.3mm
- 3D file : CAN-L4-PWM_STEP.zip
- Firmware
- ArduPilot AP_Periph MatekL431-Dshot
- Update via DroneCAN GUI Tool
Packing
- 1x CAN-L4-PWM board
- 1x JST-GH-4P to JST-GH-4P 20cm silicon wire
Paramaters