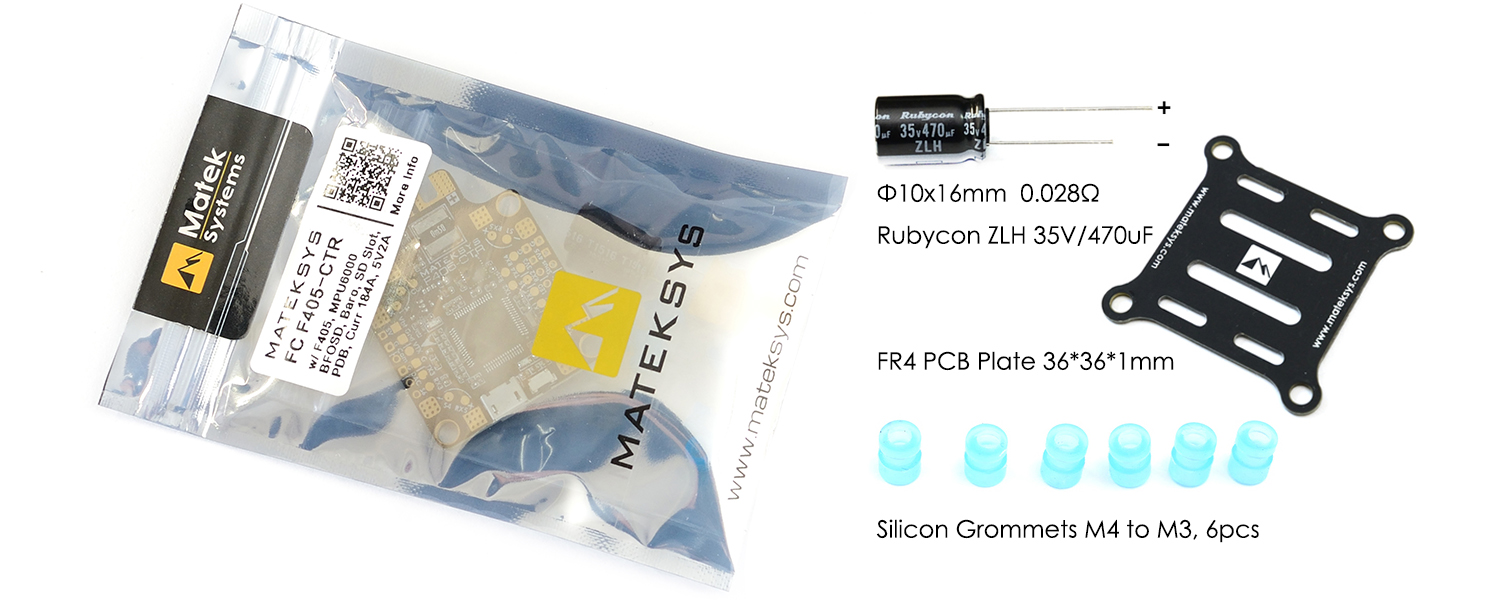
Flight Controller F405-CTR
STM32F405, MPU6000, BMP280, BFOSD, SD Card Slot, VCP+5x UARTs, PDB, Current Sensor 184A, BEC 5V/2A



Gallery

Spec.
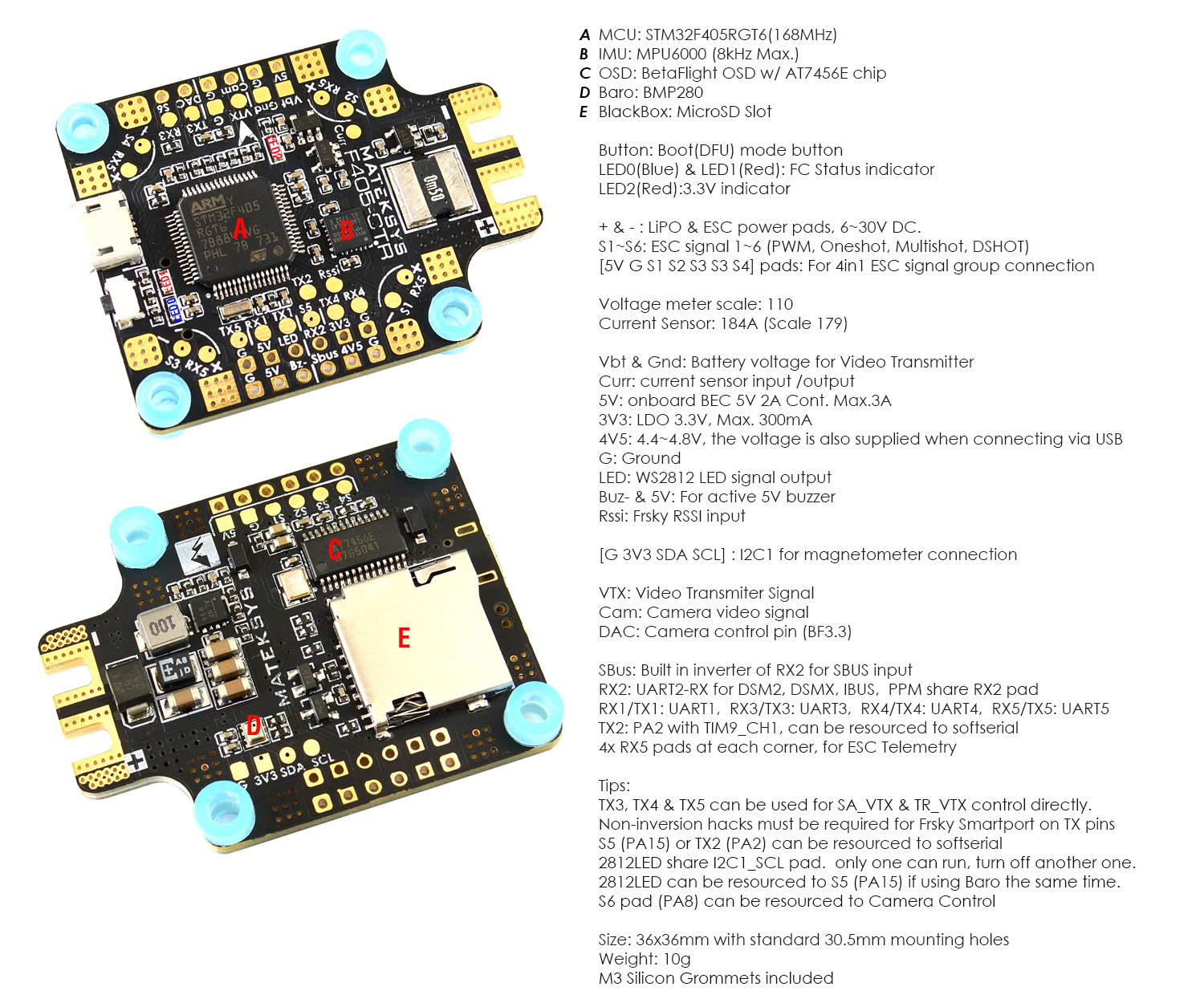
FC Specifications
- MCU: 168MHz STM32F405
- IMU: MPU6000 accelerometer/gyro (SPI)
- Baro: BMP280 (I2C)
- OSD: BetaFlight OSD w/ AT7456E chip
- Blackbox: MicroSD card slot (SD/SDHC)
- VCP, UART1, UART2, UART3, UART4, UART5
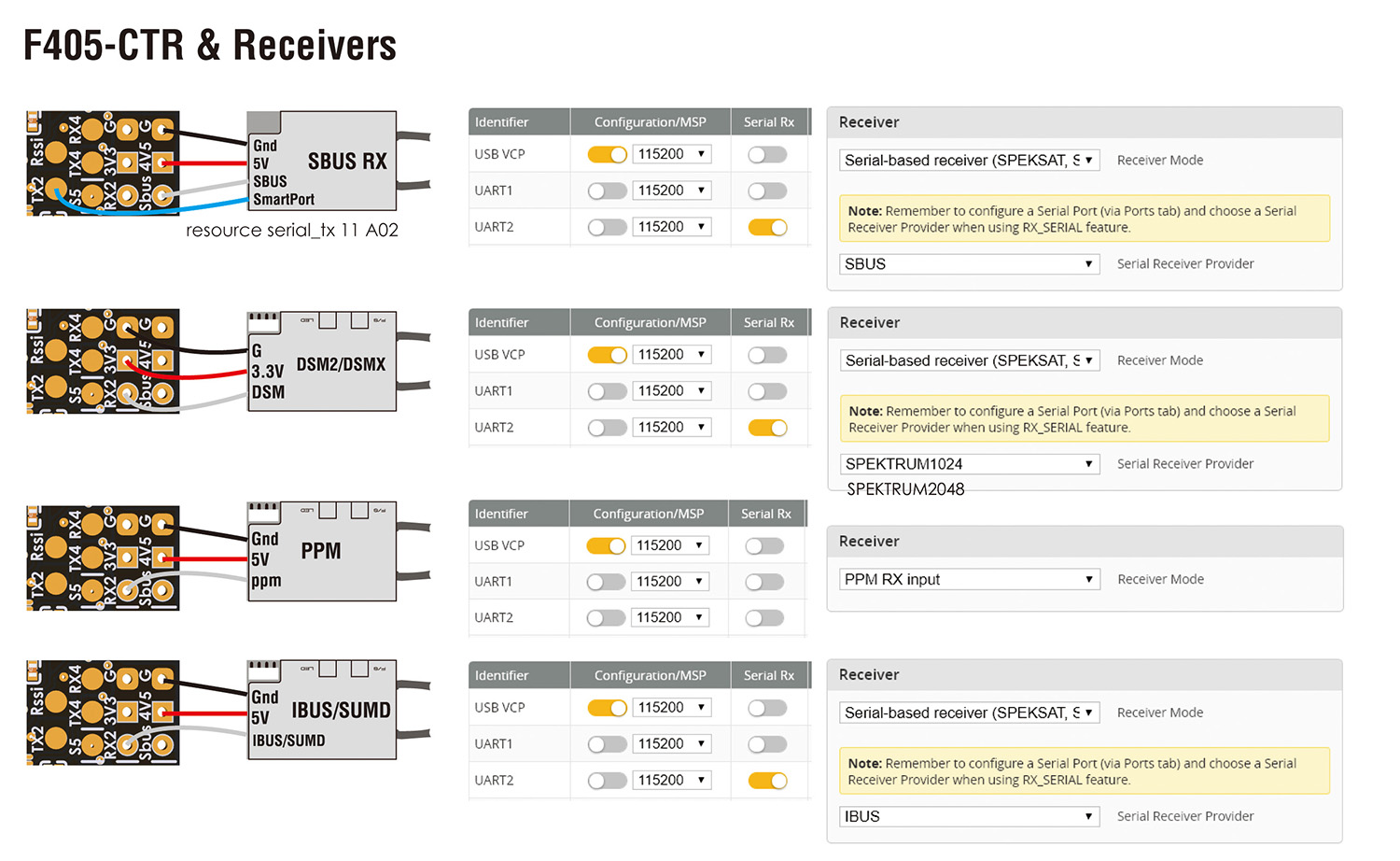
- Built in inverter for SBUS input (UART2-RX)
- PPM/UART Shared: UART2-RX
- SoftSerial on TX2, S5 or S6 optional
- Camera control on S6 or DAC optional
- Smartaudio & Tramp VTX protocol supported
- WS2812 Led Strip : Yes
- Beeper : Yes
- RSSI: Yes
PDB Specifications
- Input: 6~30V (3~6S LiPo) w/TVS protection
- PDB: 4x30A (Max.4x46A), 6 layers*2oz copper PCB
- BEC: 5V 2A cont. (Max.3A)
- LDO 3.3V: Max.300mA for Spektrum RX
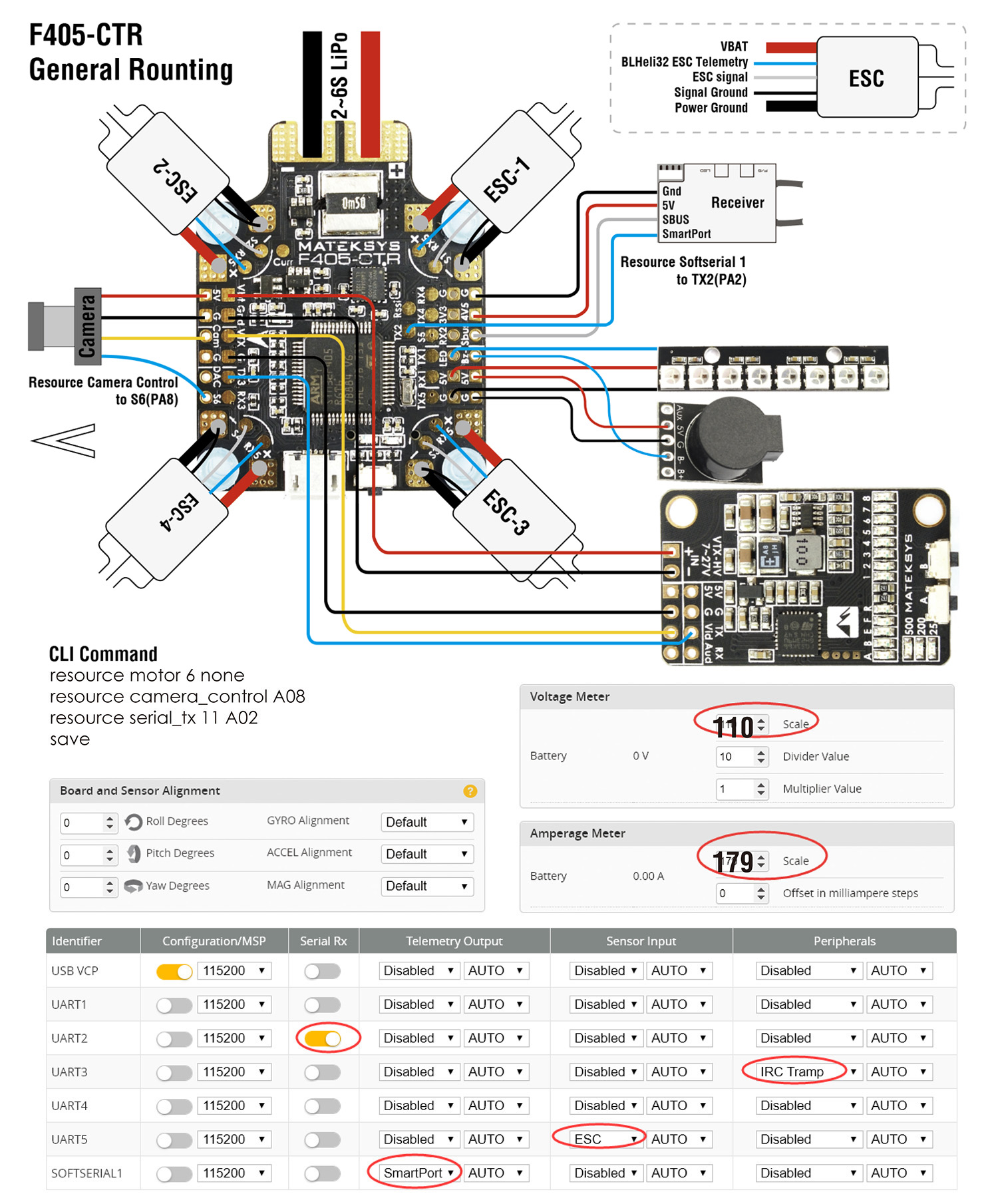
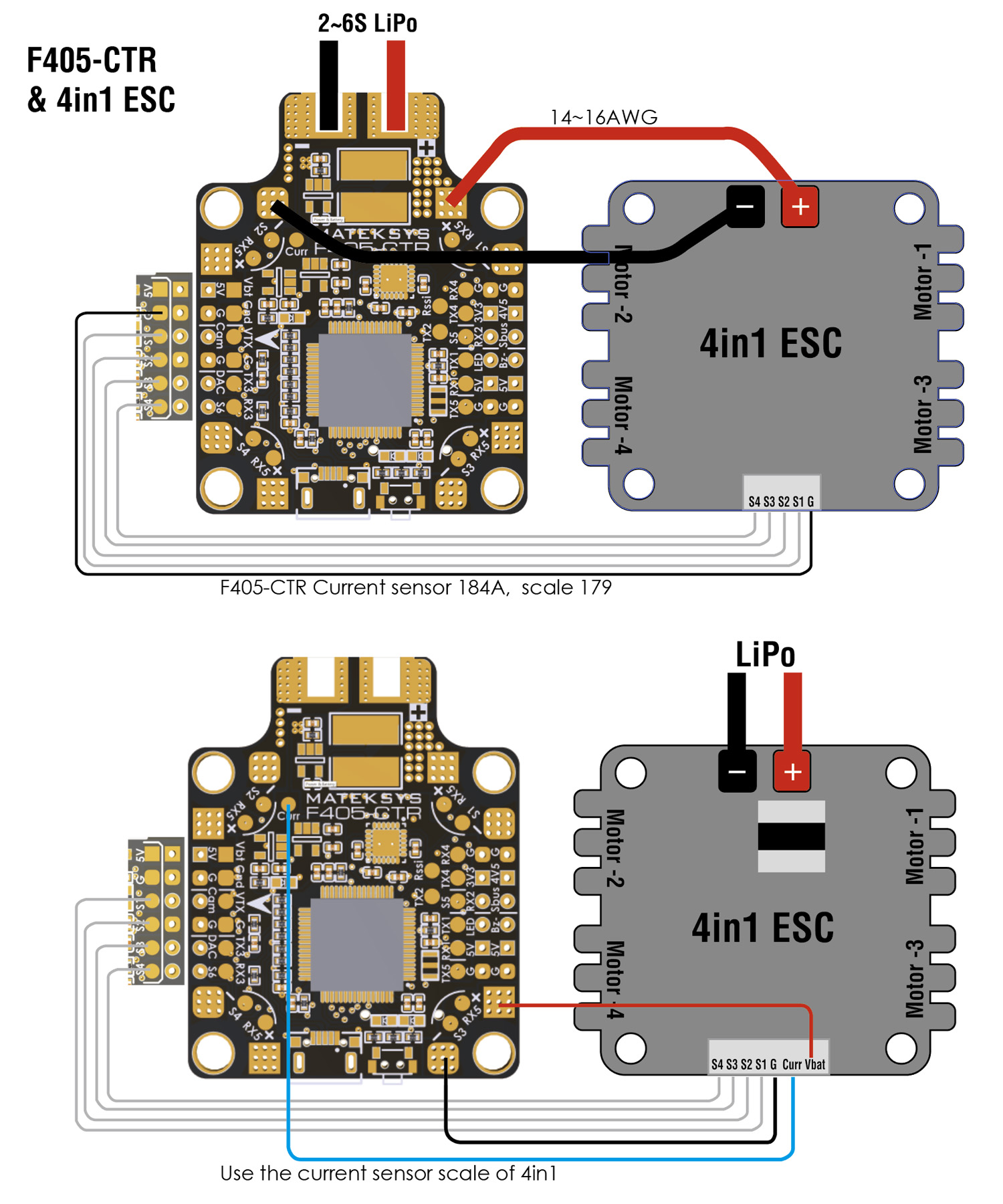
- Current Sensor 184A (Scale 179)
- Battery Voltage Sensor: 1:10 (Scale 110)
- 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
- 6x PWM / DShot outputs without conflict
- 5x UARTs
- 1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
- 4x pairs of corner pads for ESC Signal/GND connections (DSHOT compatible)
- 1x pair I2C1 pads
- 1x Side-press button for BOOT(DFU) mode
- 36x46mm PCB with 30.5mm mounting holes
- 10g
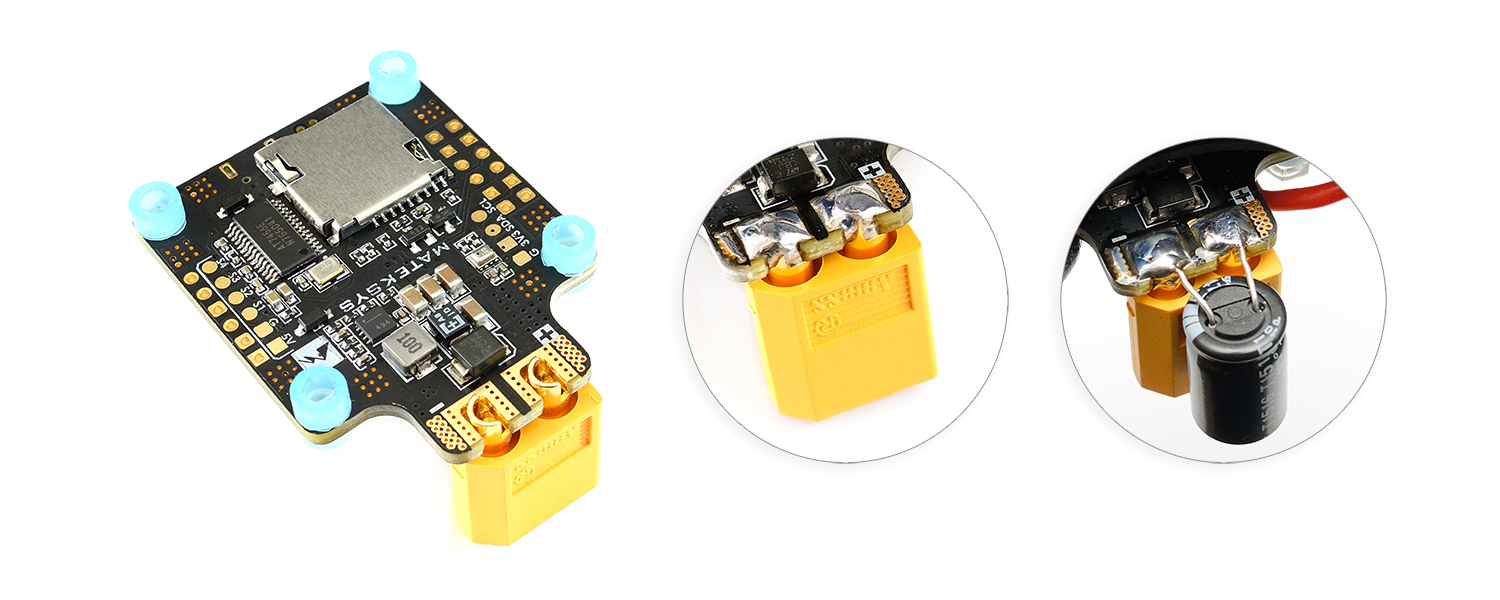
- w/ 1x Rubycon ZLH 35V/470uF (Low ESR)
- w/ 6x silicon grommets M4 to M3
- w/ 1x FR4 PCB Plate 36*36*1mm
BF Wiring
BF Pins Definition
| Pad/Hole | PIN | TIM | Resource option |
| PPM | PA3 | TIM5_CH4 | |
| S1 | PC6 | TIM3_CH1 | |
| S2 | PC7 | TIM8_CH2 | |
| S3 | PC8 | TIM8_CH3 | |
| S4 | PC9 | TIM8_CH4 | |
| S5 | PA15 | TIM2_CH1 | LED_STRIP, serial_tx 11 |
| S6 | PA8 | TIM1_CH1 | camera_control |
| 2812 LED Strip | PB6 | TIM4_CH1 | |
| TX4 | PA0 | TIM5_CH1 | serial_tx 12 (BF3.2.3 or last) |
| RX4 | PA1 | TIM5_CH2 | serial_rx 12 (BF3.2.3 or last) |
| TX2 | PA2 | TIM9_CH1 | serial_tx 11 (BF3.2.3 or last) |
| DAC | PA4 |
- S5 (PA15) or TX2 (PA2) can be resourced to softserial for Frsky SmartPort
- 2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro/Magnetometer.
- 2812LED can be resourced to S5 (PA15) if using I2C devices(Baro/Magnetometer) the same time with BF firmware
- S6 pad (PA8) can be resourced to Camera Control
CLI command
- resource motor 5 none
- resource led_strip 1 A15
- resource motor 6 none
- resource camera_control A08
- resource serial_tx 11 A02
- save
INAV Wiring
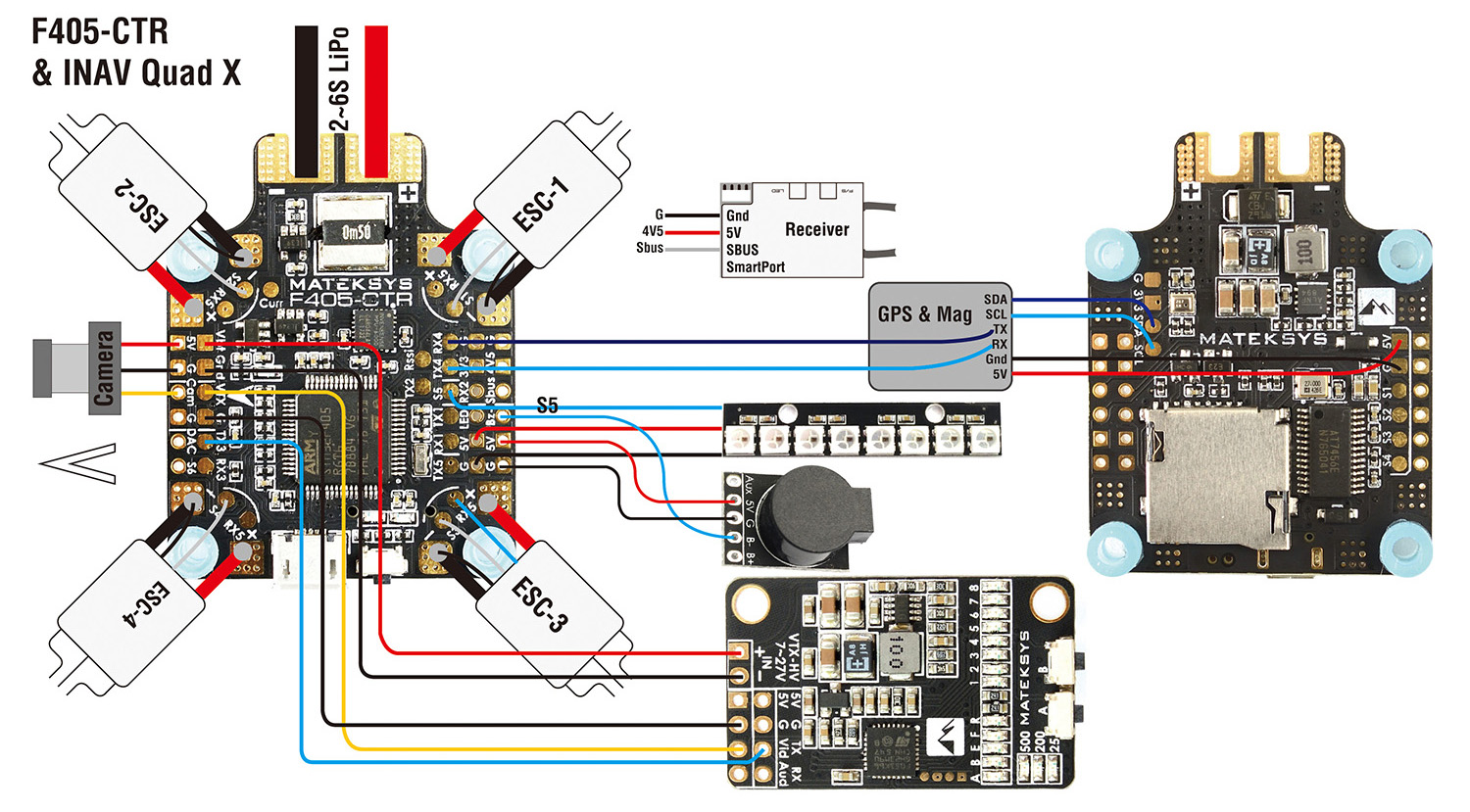
INAV Pins Definition
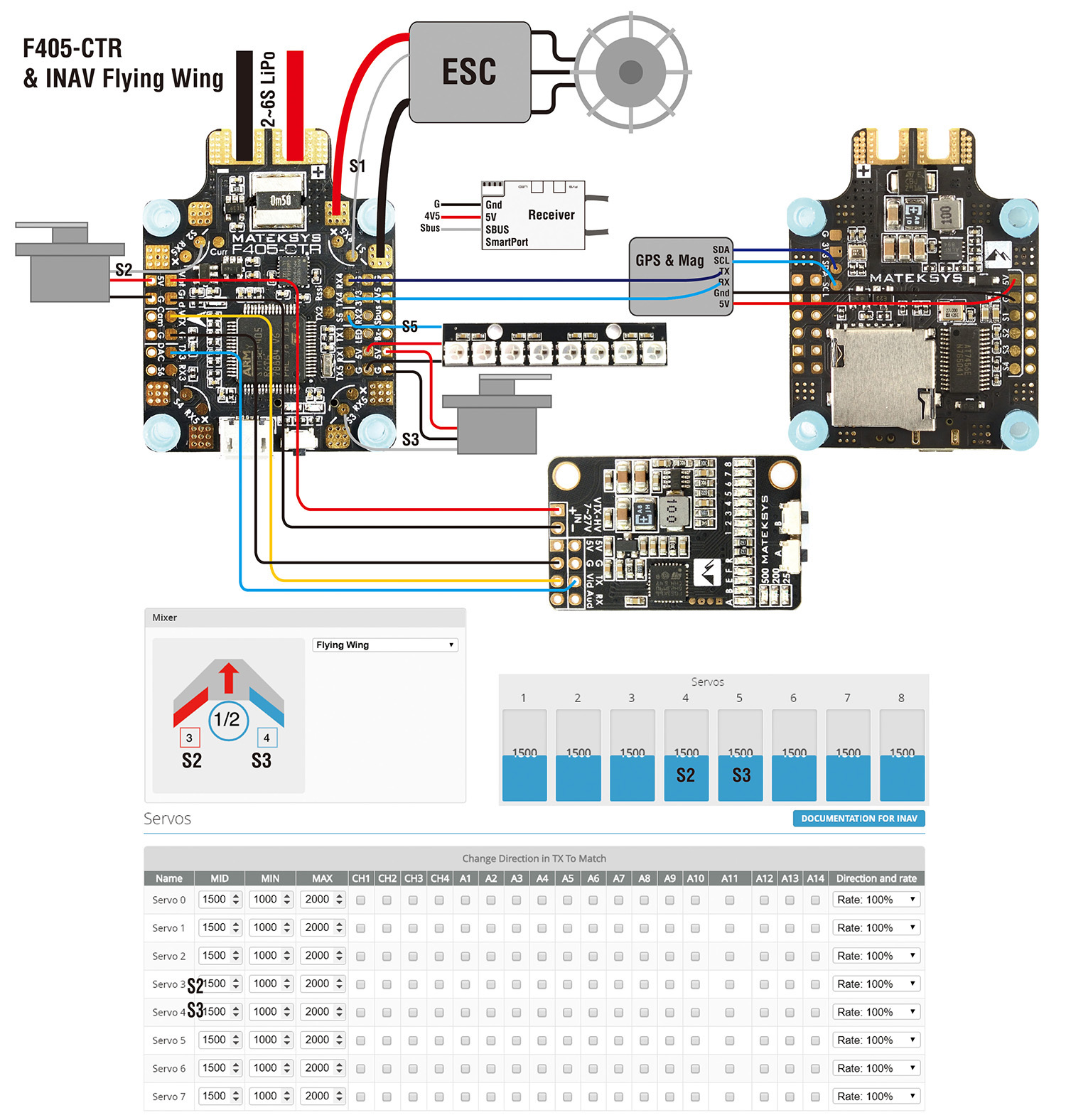
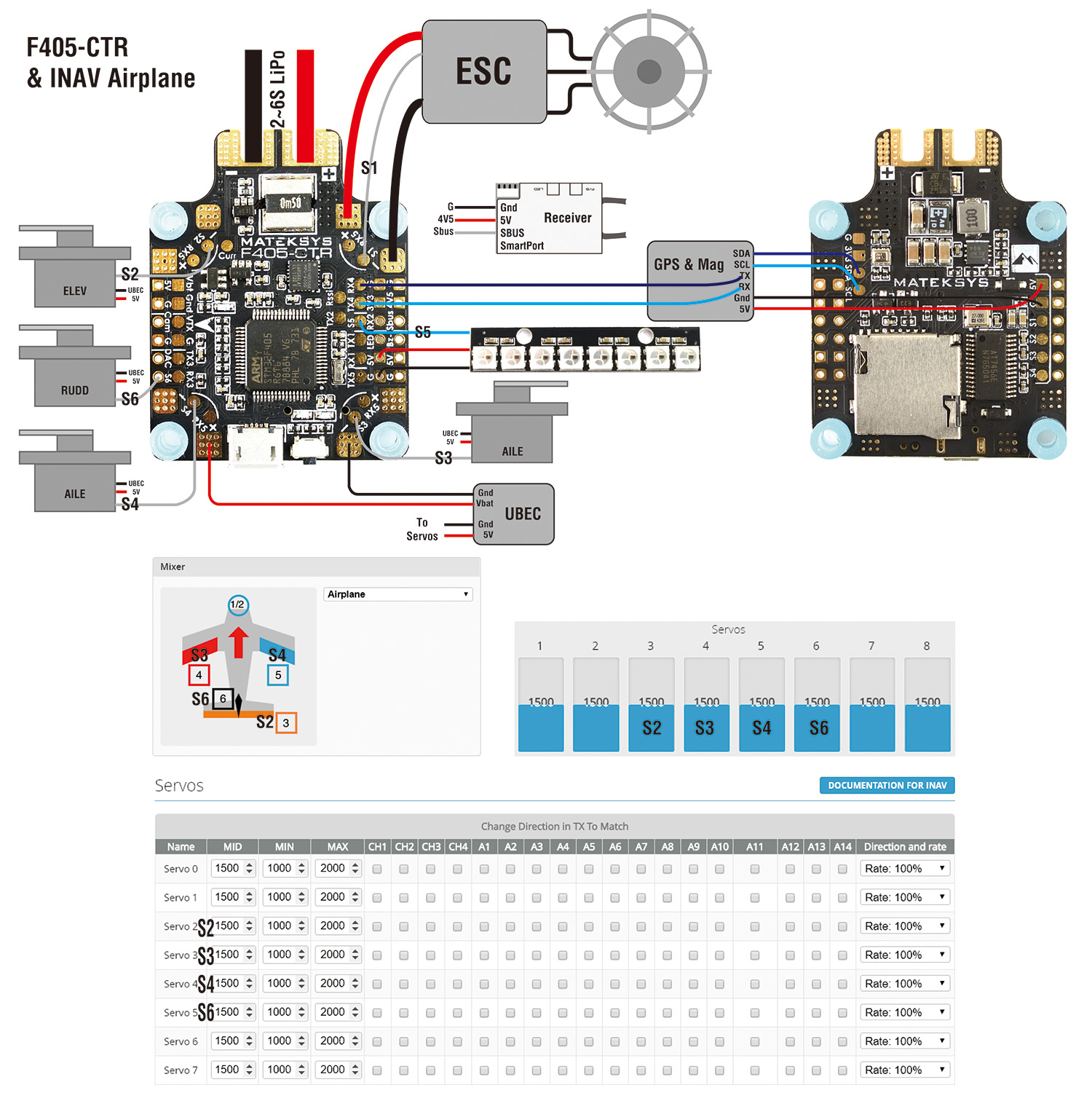
| Pad/Hole | Pin | Inav | INav | INav | INav | INav |
| Tricopter | Quad X | Hex X | Flying Wing | Airplane | ||
| PPM/RX2 | PA3 | |||||
| S1 | PC6 | servo-1 | motor-1 | motor-1 | motor-1 | motor-1 |
| S2 | PC7 | motor-1 | motor-2 | motor-2 | servo | servo |
| S3 | PC8 | motor-2 | motor-3 | motor-3 | servo | servo |
| S4 | PC9 | motor-3 | motor-4 | motor-4 | servo | |
| S5 | PA15 | 2812LED | 2812LED | motor-5 | 2812LED | 2812LED |
| S6 | PA8 | motor-6 | servo | |||
| LED | PB6 | / | / | / | / | / |
ArduPilot(ChibiOS)
ArduPilot WIKI
- http://ardupilot.org/copter/docs/common-loading-firmware-onto-chibios-only-boards.html
- https://ardupilot.org/copter/docs/common-matekf405.html
- OSD http://ardupilot.org/plane/docs/common-osd-overview.html
Threads related
Firmware
- http://firmware.ardupilot.org/
- ArduPilot (ChibiOS) Target MatekF405 for F405-CTR
- ArduPilot (ChibiOS) Target MatekF405-STD for F405-STD
PWM outputs
- S1 PWM1 TIM3
- S2 PWM2 TIM8
- S3 PWM3 TIM8
- S4 PWM4 TIM8
- S5 PWM5 TIM2
- S6 PWM6 TIM1
- Motor can’t share same TIM with servo.
Default UART order
- SERIAL0 = console = USB
- SERIAL1 = Telemetry1 = USART3
- SERIAL2 = Telemetry2 = UART4
- SERIAL3 = GPS1 = USART1
- SERIAL4 = GPS2 = UART5
ADC
- BATT_VOLT_PIN 15
- BATT_VOLT_MULT 11.0
- BATT_CURR_PIN 14
- BATT_AMP_PERVLT 56 (F405-CTR)
- BATT_MONITOR 4
- RSSI_ANA_PIN 9
Frsky Smartport Telemetry
- non-inverted (hacked) S.Port signal
- TX4 pad
- SERIAL2_BAUD 57
- SERIAL2_OPTIONS 7
- SERIAL2_PROTOCOL 4
Tips
- CLI “defaults” after reflashing
- S5 (PA15) or TX2 (PA2) can be resourced to softserial for Frsky SmartPort
- 2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro/compass.
- 2812LED can be resourced to S5 (PA15) if using Baro/compass the same time with BF firmware
- Put a piece of sponge on the barometer to reduce the impact of airflow.

