Flight Controller F411-mini
STM32F411,MPU6000, BFOSD, 6x PWM / DShot outputs, Built-in BEC 5V 2A, 20×20 mounting holes

Note
End of life, replaced by F411-miniSE
Album & INFO

Spec. & Features
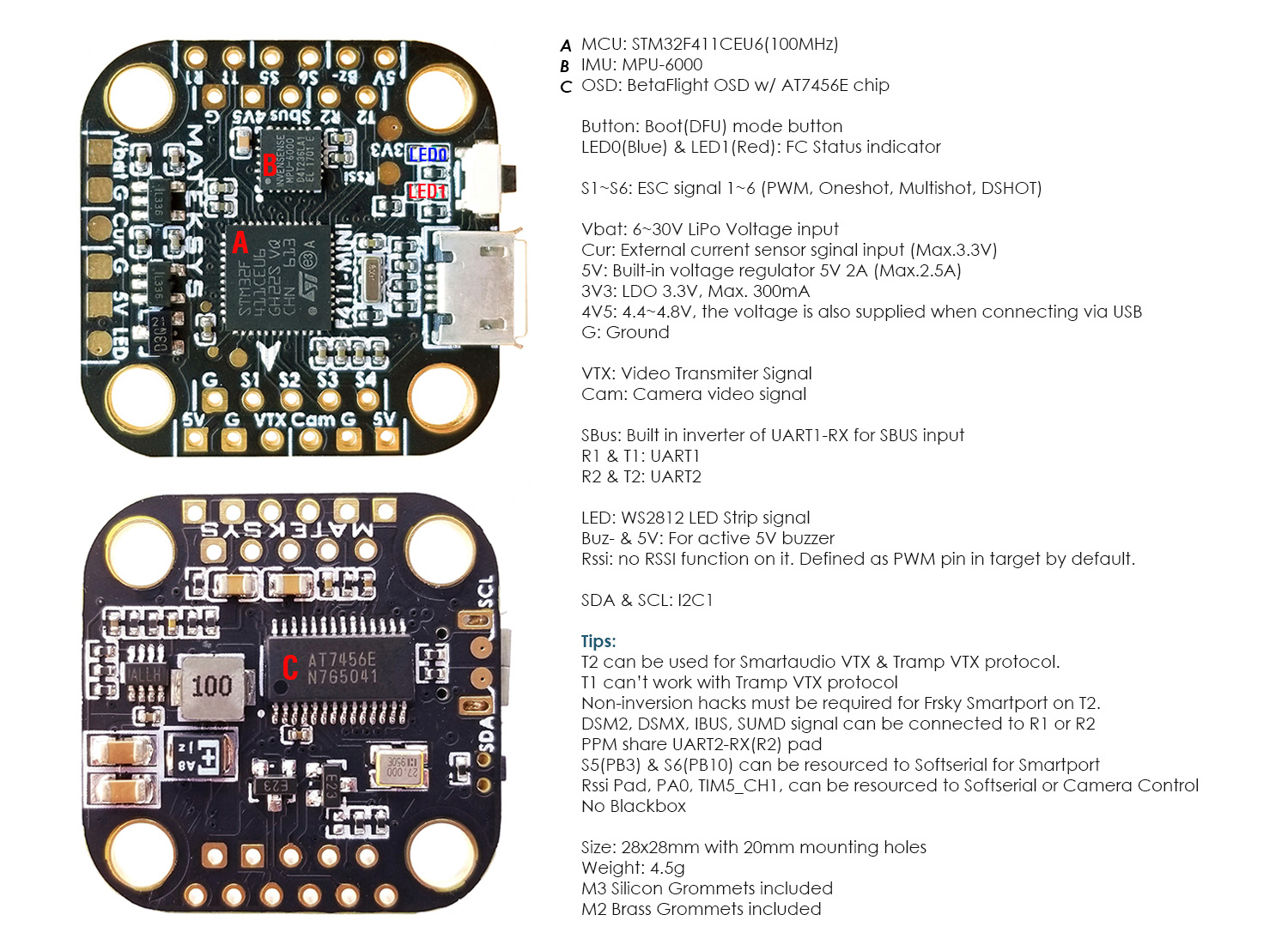
- MCU: 100MHz STM32F411
- IMU: MPU6000
- OSD: BetaFlight OSD w/ AT7456E chip
- VCP, UART1, UART2,
- 6x PWM/Dshot outputs
- 2x LEDs for FC STATUS (Blue, Red)
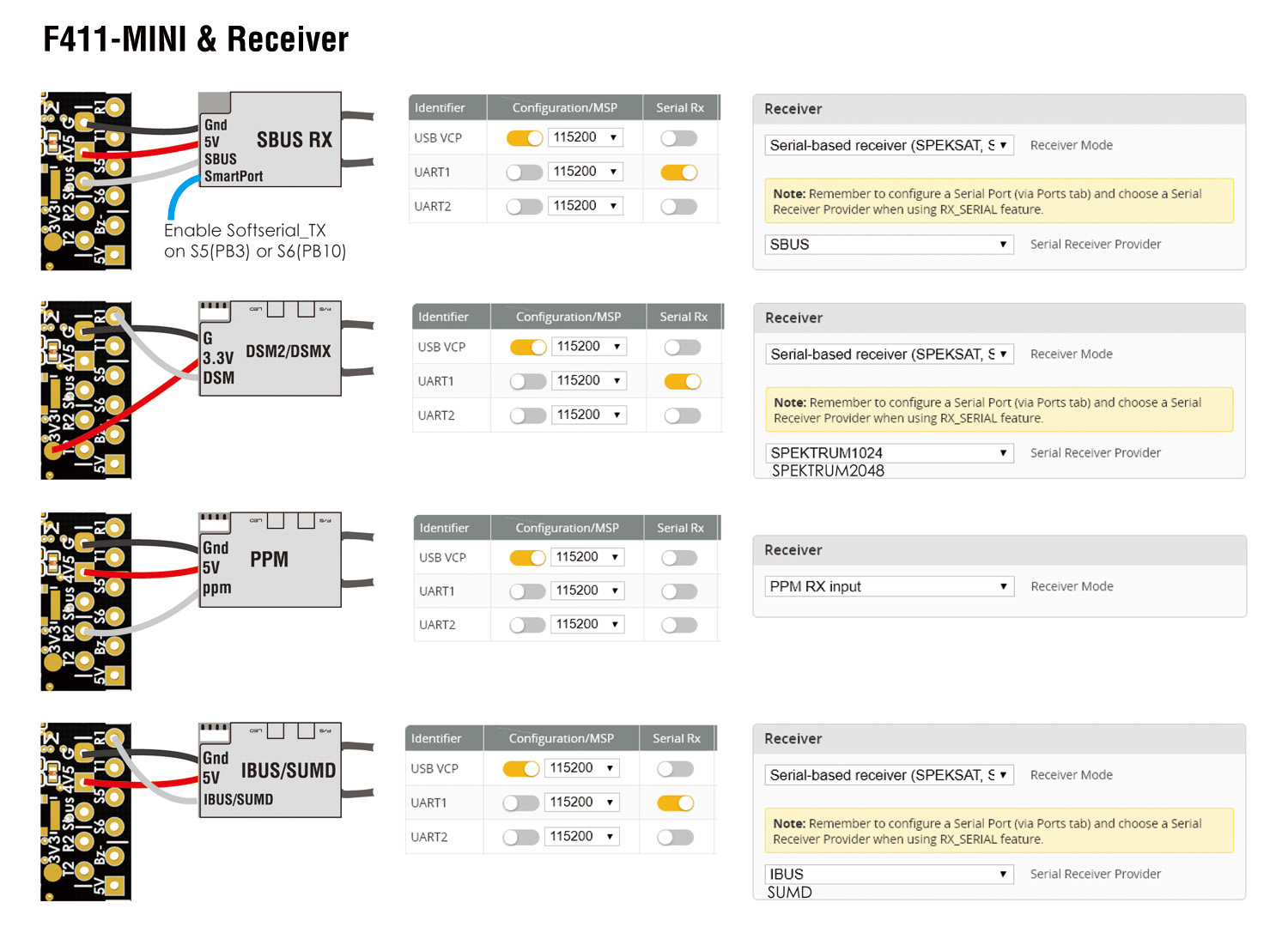
- Built in inverter for SBUS input (UART1-RX)
- PPM/UART Shared: UART2-RX
- SoftSerial supported on S5 & S6
- Camera control supported on Rssi pad
- Battery Voltage Sensor: 1:10
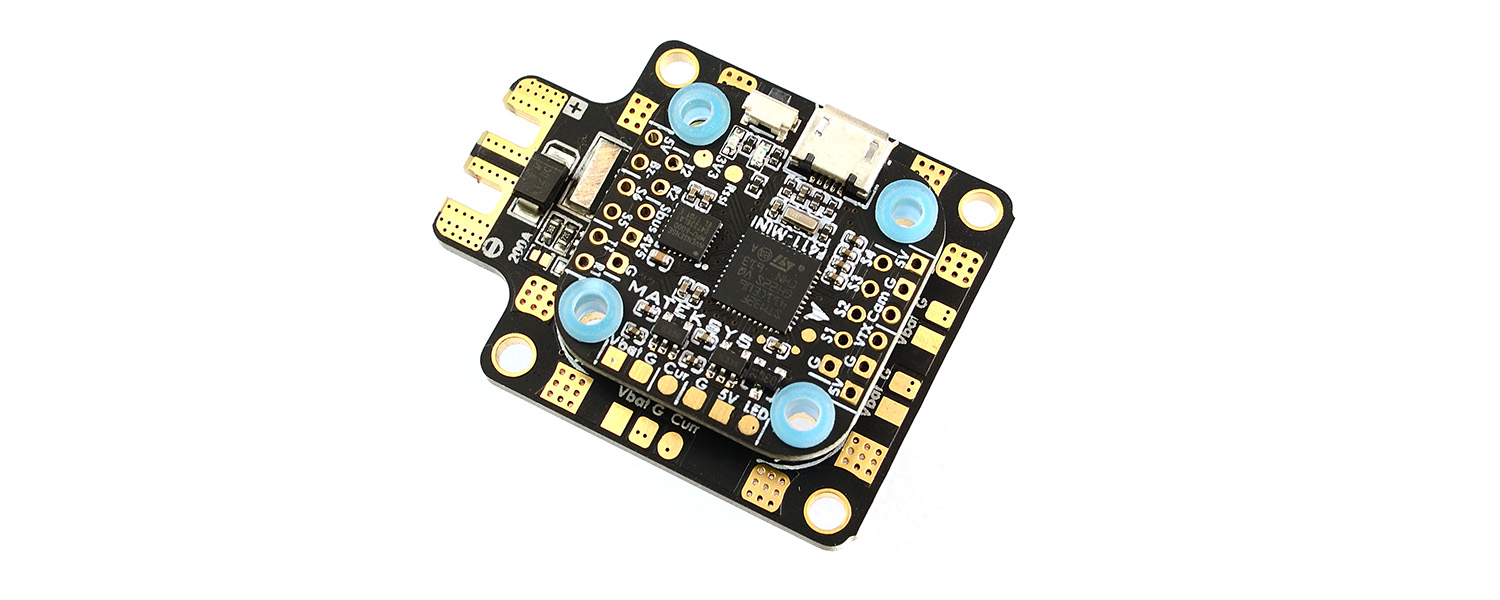
- Current Sensor: No (FCHUB-A option)
- BEC 5V: 2A
- LDO 3.3V: Max.300mA
- I2C1 SDA & SCL available
- WS2812 Led Strip : Yes
- Beeper : Yes
- RSSI: No
- Blackbox: No
- 28x28mm PCB with 20mm mounting holes
- 4.5g
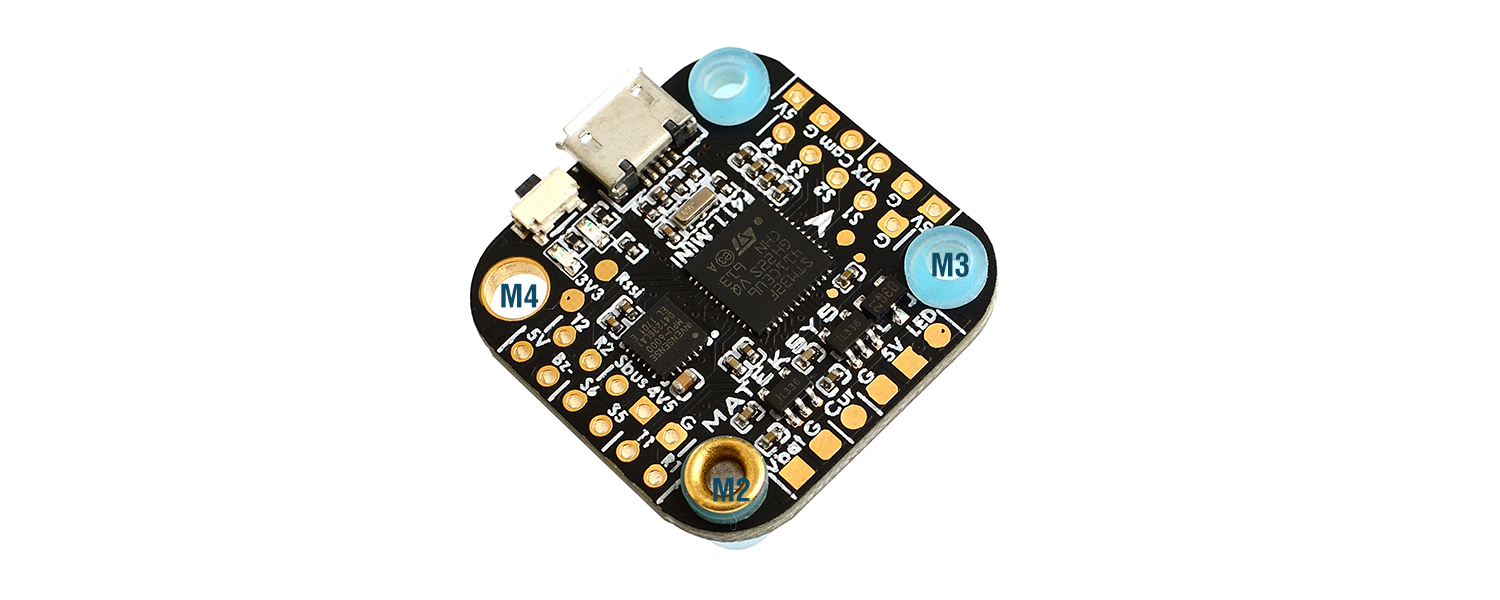
- w/ 6x silicon grommets M4 to M3
- w/ 6x brass grommets M3 to M2
Connection Guide
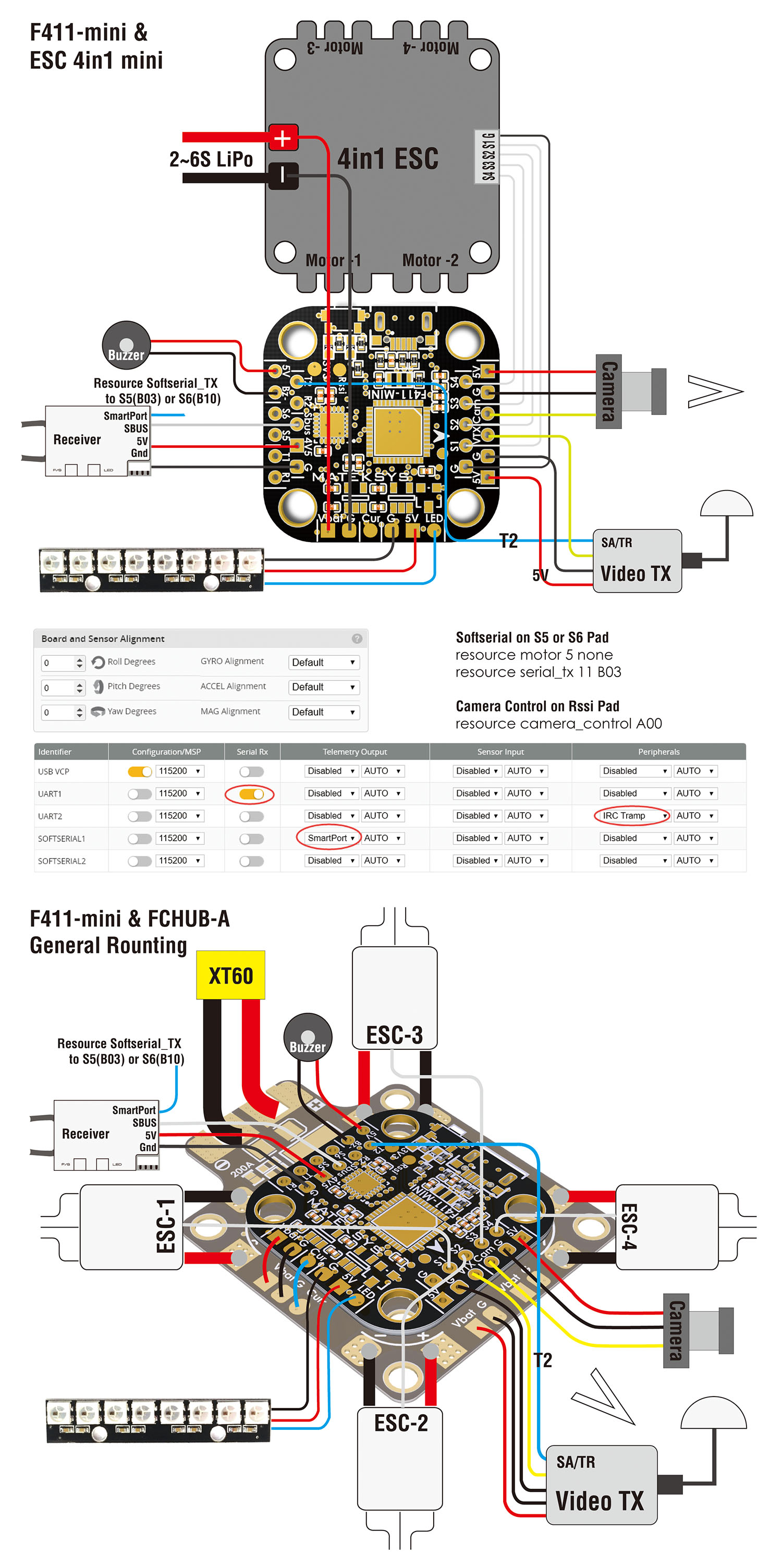
SmartPort & Camera_Control
Pins Definition
- S1: PB4 TIM3_CH1
- S2: PB5 TIM3_CH2
- S3: PB6 TIM4_CH1
- S4: PB7 TIM4_CH1
- S5: PB3 TIM2_CH2
- S6: PB10 TIM2_CH3
- Rssi pad: PA0 TIM5_CH1
- 2812LED: PA8 TIM1_CH1
Enable SoftSerial_TX on S5 or S6 pad
1. Connect the inverted telemetry signal to S5 pad
2. Turn on “SOFTSERIAL” & “TELEMETRY” in Configuration tab
3. CLI commands as following
- resource motor 5 none
- resource serial_tx 11 B03
- save
4. Choose SOFTSERIAL1 for Smartport in Ports tab.
Enable Camera control on RSSI pad
1. Connect “OSD” pin of camera to RSSI pad
2. CLI command as following
- resource camera_control A00
- save
3. Stick commands for controlling the camera
- DISARM
- ENTER: Roll Center, Pitch Center, Throttle Center, Yaw Right
- LEFT: Throttle Center, Yaw Left
- RIGHT: Throttle Center, Yaw Right
- UP: Throttle Center, Pitch Up
- DOWN: Throttle Center, Pitch Down
- Adjust Value: Pitch,Throttle & Yaw Center, Roll Left or Right
Tips
- Enclosed brass grommets are used to converte M3 to M2.
- Enclosed silicon grommets are necessary to avoid the vibration woes.
- T2 can be used for Smartaudio VTX & Tramp VTX protocol.
- T1 can’t work with Tramp VTX protocol
- Non-inversion hacks must be required for Frsky Smartport on T2.
- DSM2, DSMX, IBUS, SUMD signal can be connected to R1 or R2
- PPM share UART2-RX(R2) pad
- S5(PB3) & S6(PB10) can be resourced to Softserial for Smartport
- Rssi pad, PA0 with TIM5_CH1, can be resourced to Softserial or Camera Control
- No Blackbox
INAV mapping
| Flying Wing | Airplane | Quad X | Hex X | |
| S1 | Motor-1 | Motor-1 | Motor-1 | Motor-1 |
| S2 | Motor-2 | Motor-2 | Motor-2 | Motor-2 |
| S3 | Left AILE | ELEV | Motor-3 | Motor-3 |
| S4 | Right AILE | Left AILE | Motor-4 | Motor-4 |
| S5 | Gimbal PITCH | Right AILE | Gimbal PITCH | Motor-5 |
| S6 | Gimbal ROLL | RUDD | Gimbal ROLL | Motor-6 |
–
| SBUS | Sbus pad | Built-in inverter on UART1-RX |
| GPS | UART2 (T2 R2) | |
| Frsky Smartport or VTX control |
RSSI Pad | Softserial-TX1 is enabled on RSSI pad by default |
–
| PPM | RSSI Pad | Need to disable CPU based serial ports |
| GPS | UART1 (T1 R1) | |
| VTX control | UART2 (T2) | SA / TR |
–
| CrossFire | UART1 (T1 R1) | |
| GPS | UART2 (T2 R2) | |
| VTX control | RSSI Pad | Softserial-TX1 is enabled on RSSI pad by default |
–
| Spektrum/IBUS | UART1 (R1) | |
| GPS | UART2 (T2 R2) | |
| VTX control | RSSI Pad | Softserial-TX1 is enabled on RSSI pad by default |
–
| External Baro | I2C1 (SDA, SCL) | BMP280 /MS5611 /BMP085 |
| Magnetometer | I2C1 (SDA, SCL) | HMC5883 /MAG3110 /QMC5883 /IST8310 |
| AirSpeed Pitot | I2C1 (SDA, SCL) | Pitot_MS4525 |

