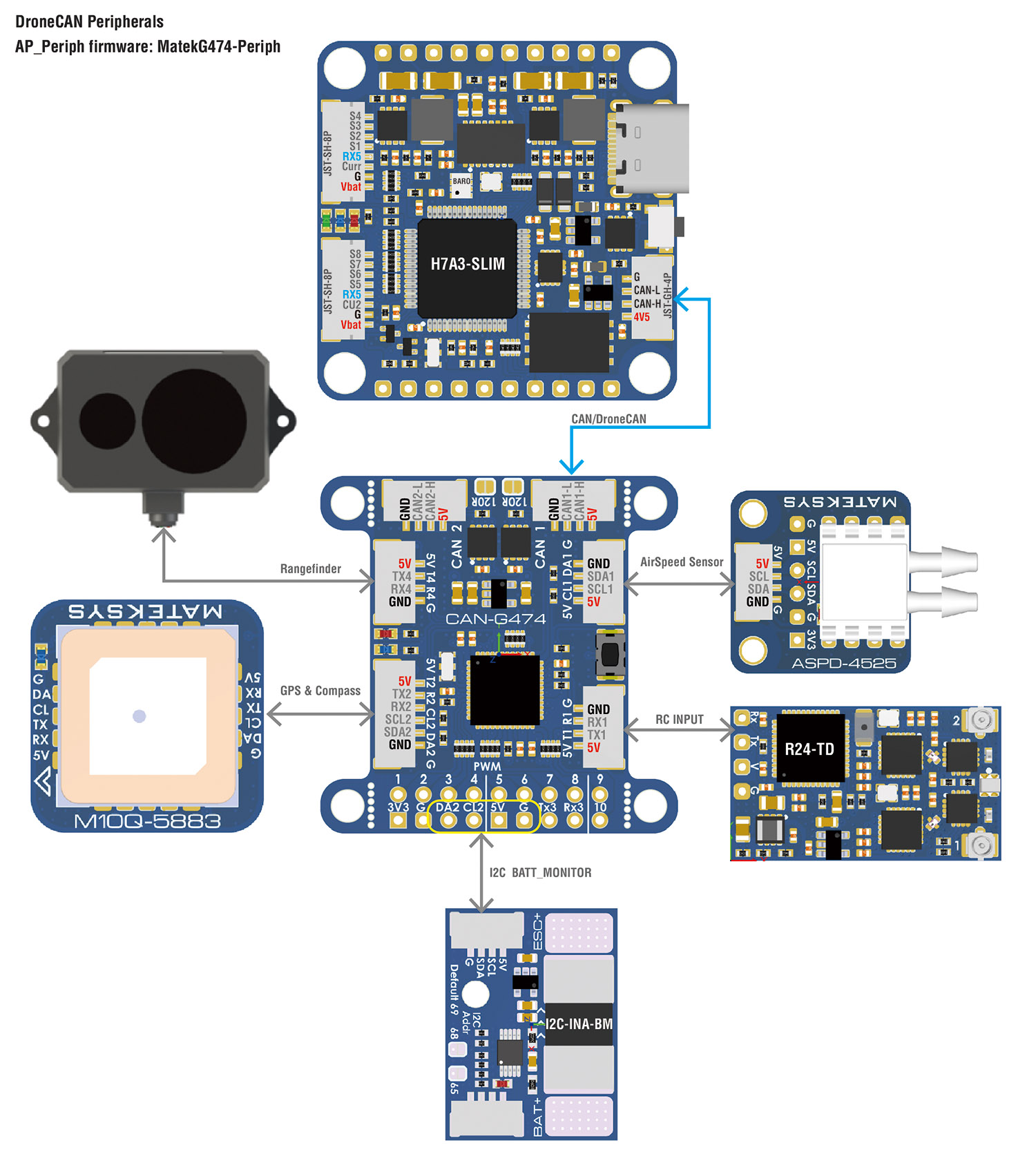
Specifications
- CAN-G474 is an Adapter Node based on ArudPilot AP_Periph firmware.
- with 5Mbit/s CAN transceiver and STM32G474 MCU, CAN-G474 is capable of CANFD.
- With this board, you can easily utilize the ArduPilot driver library to convert ArduPilot supported GNSS, Compass, Barometer, Airspeed sensor, Rangefinder, Proximity sensor, Electronic Fuel Injectors and GPIO based (PWM, LED notify) peripherals to DroneCAN bus peripherals.
Specifications
- MCU: STM32G474CE, 512KB Flash
- CAN transceiver data rates up to 5Mbit/s
- 2x CAN bus
- 4x UARTs
- for peripheral GNSS, Rangefinder, Proximity, EFI, RC input(receiver)
- support GNSS, Compass, Barometer sensors over MSP protocol. MSP is enable on TX3 by default.
- 2x I2C bus
- for peripheral I2C Airspeed sensor, Barometer, Compass
- 1x SPI
- for peripheral RM3100
- SPI pads for RM3100 are on bottom side, with “CS, MOSI, MISO, SCK” silkprint
- 11x PWM outputs
- for Servos and ESC, all PWMs support DMA/DShot
- PWM1-10 on DuPont 2.54mm holes
- PWM11 pad is on bottom side, with “11” silkprint
- ST debug, SWC & SWD(on bottom side)
- UART1(TX1,RX1) support firmware update in DFU mode
- LED
- Blue, Fast blinking, Booting
- Blue, Slow blinking, communicating with flight controller
- Red, 3.3V indicator
- Input voltage range: 4.5~5.5V @5V pad/pin
- Power consumption: 62mA
- Operating Temperatures: -30~85 °C
Physical
- 5x JST-GH-4P(SM04B-GHS-TB) for CAN1, CAN2, I2C1, UART1 and UART4
- 1x JST-GH-6P(SM06B-GHS-TB) for UART3+I2C2
- 18x DuPont 2.54mm holes
- Board Size: 36mm*36mm*6mm. 5.2g,
- Mounting: 30.5mm 4x Dia.3mm
- 3D file : CAN-G474_STEP.zip
Packing
- 1x CAN-G474 board
- 2x JST-GH-4P to JST-GH-4P 20cm silicon wire
- 1x JST-GH-6P to JST-GH-6P 20cm silicon wire
Firmware
- ArduPilot AP_Periph MatekG474-Periph for peripheral sensors
- ArduPilot AP_Periph MatekG474-DShot for DroneCAN-PWM output
- Update via DroneCAN GUI Tool or Mission Planner–DroneCAN Tab, load “AP_Periph.bin“
- Update via STM32CubeProgrammer in DFU mode, connect USB-TTL module to UART1, Plug USB while holding the DFU button in, load “AP_Periph_with_bl.hex“.
Note
- Just need to connect either one CAN bus to flight controller, or connect both to FC for redundancy.
- SWC/SWD share MCU pins with SDA1/SCL1
- Other MCU pins not specified are useless for now.
- CAN-G474 support 1Mbit ~ 5Mbit CAN/CANFD, CAN-L431 works with 1Mbit CAN.
MatekG474-Periph
MatekG474-DShot

CAN Node parameters