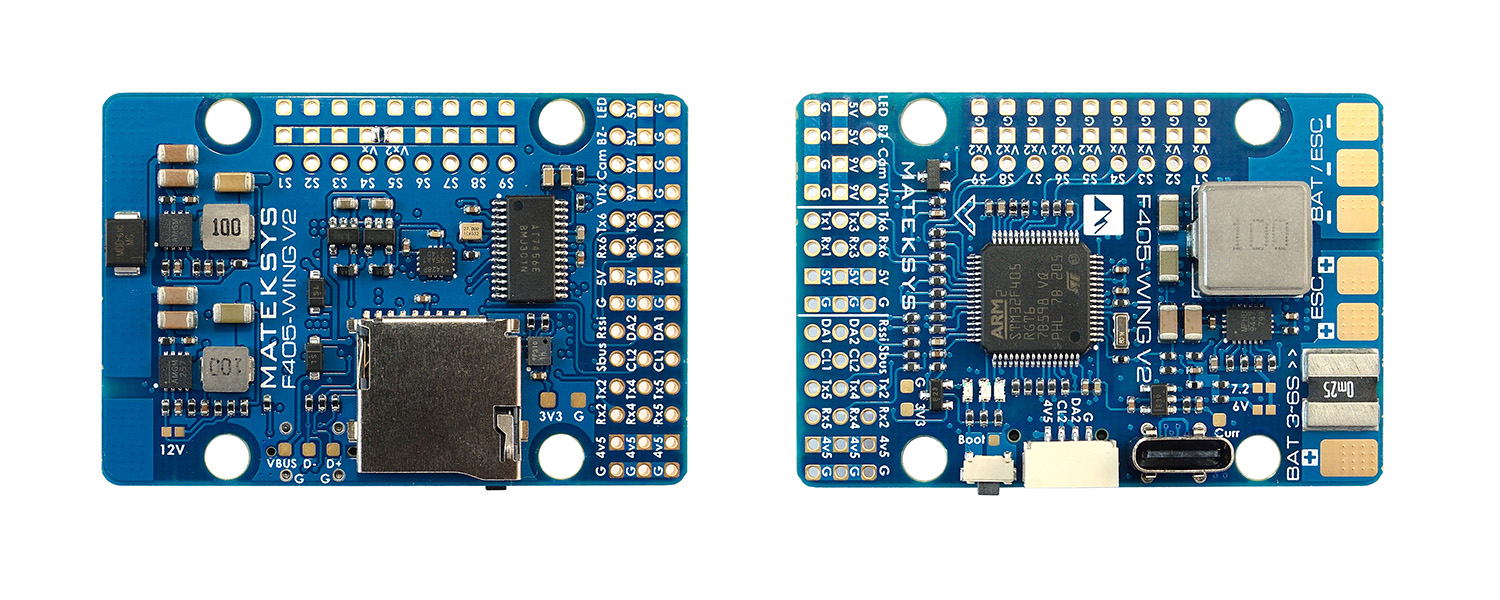
Flight Controller F405-WING-V2
STM32F405RGT6, ICM42688P, DPS310, OSD, 6xUARTs, 10x PWM, 2xI2C, 3xBEC

Gallery
Spec.& Manual
FC Specifications
- MCU: STM32F405RGT6, 168MHz , 1MB Flash
- IMU: ICM42688-P
- Baro: DPS310
- OSD: AT7456E
- Blackbox: MicroSD card slot
- 6x UARTs, 1x Softserial_Tx option(INAV)
- 10x PWM outputs
- 2x I2C
- 3x ADC (VBAT, Current, RSSI)
- Built in inverter for SBUS input
- USB Type-C(USB2.0)
FC Firmware
- ArduPilot: MatekF405-Wing (ArduPlane 4.4 or newer)
- INAV: MATEKF405SE (INAV 6.0 or newer)
PDB
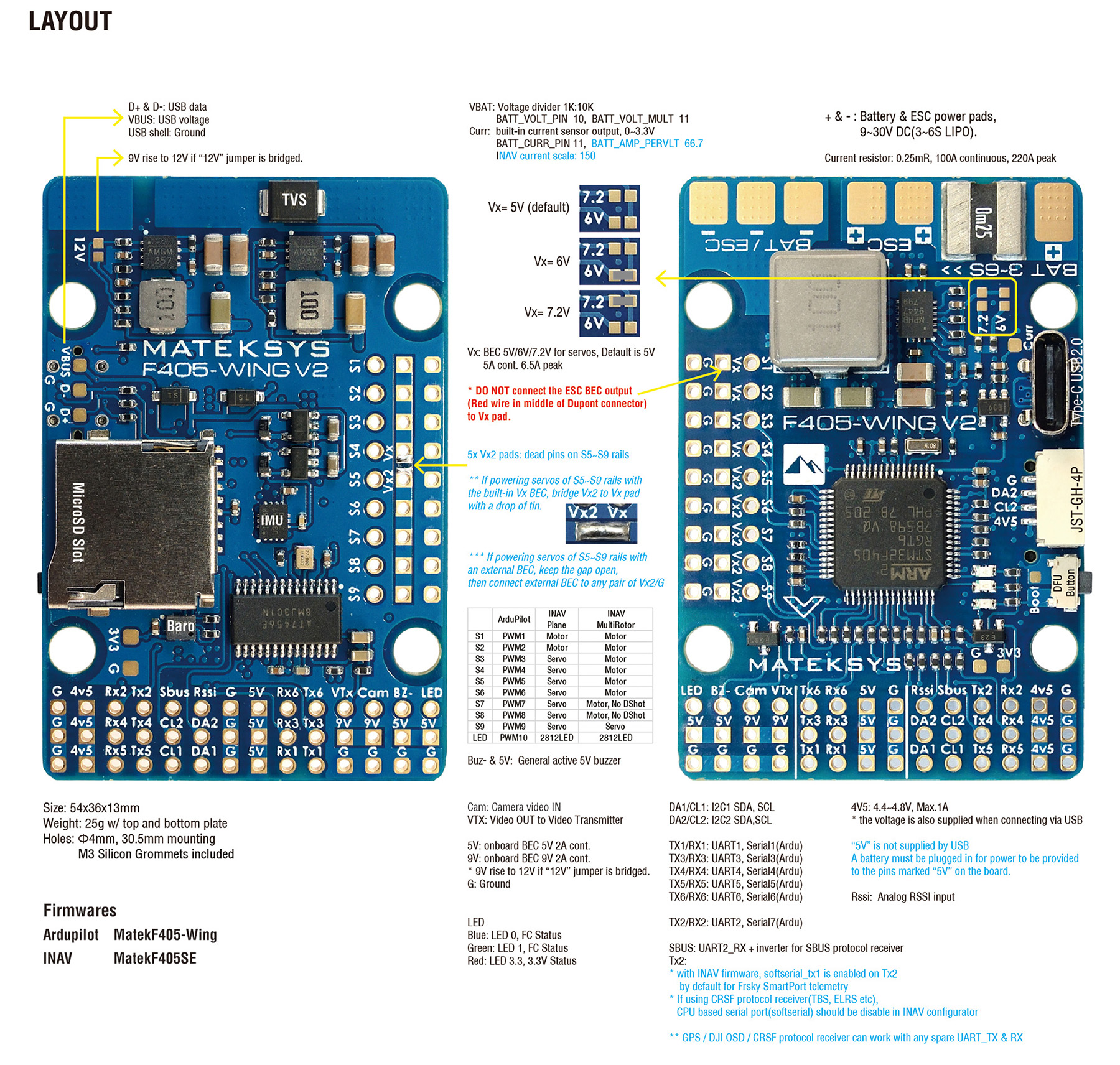
- Input voltage range: 9~30V (3~6S LiPo) w/TVS protection
- Current Senor: 220A, 3.3V ADC (INAV scale 150, ArduPilot 66.7A/V)
- Sense resistor: 100A continuous, 220A peak
- Battery Voltage divider 1K:10K (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
BEC 5V output
- Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed
- Continuous current: 2 Amps
BEC 9V /12V output
- Designed for Video Transmitter, Camera, Gimbal ect.
- Continuous current: 2 Amps
- 12V option with Jumper pad
- for stable 9V/12V output, input voltage should > output voltage +1V
BEC Vx output
- Designed for Servos
- Voltage adjustable, 5V Default, 6V or 7.2V options
- Continuous current: 5 Amps, 6A Peak
- for stable Vx output, input voltage should > Vx voltage +1V
BEC 3.3V output
- Designed for external 3.3V peripherals
- Linear Regulator
- Continuous current: 200mA
Physical
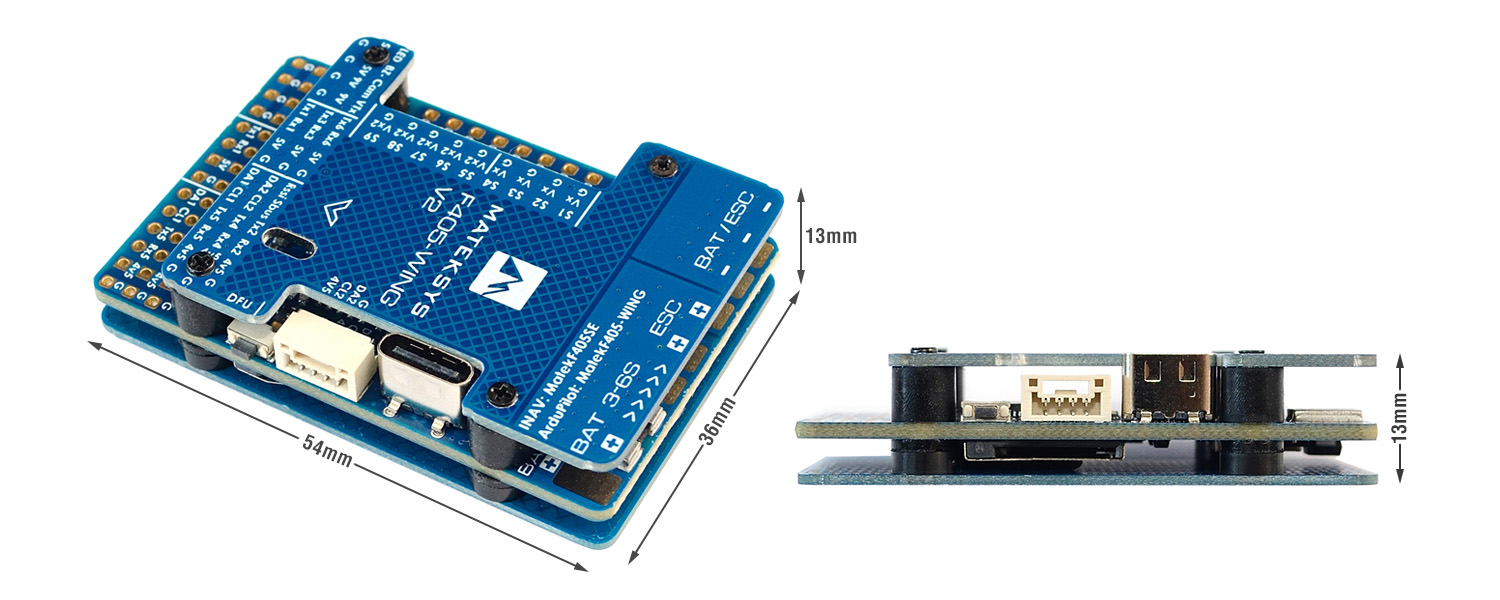
- Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
- Dimensions: 54 x 36 x 13 mm
- Weight: 25g
Including
- 1x F405-Wing-V2
- 1x 20cm JST-GH-4P to JST-GH-4P cable for I2C port
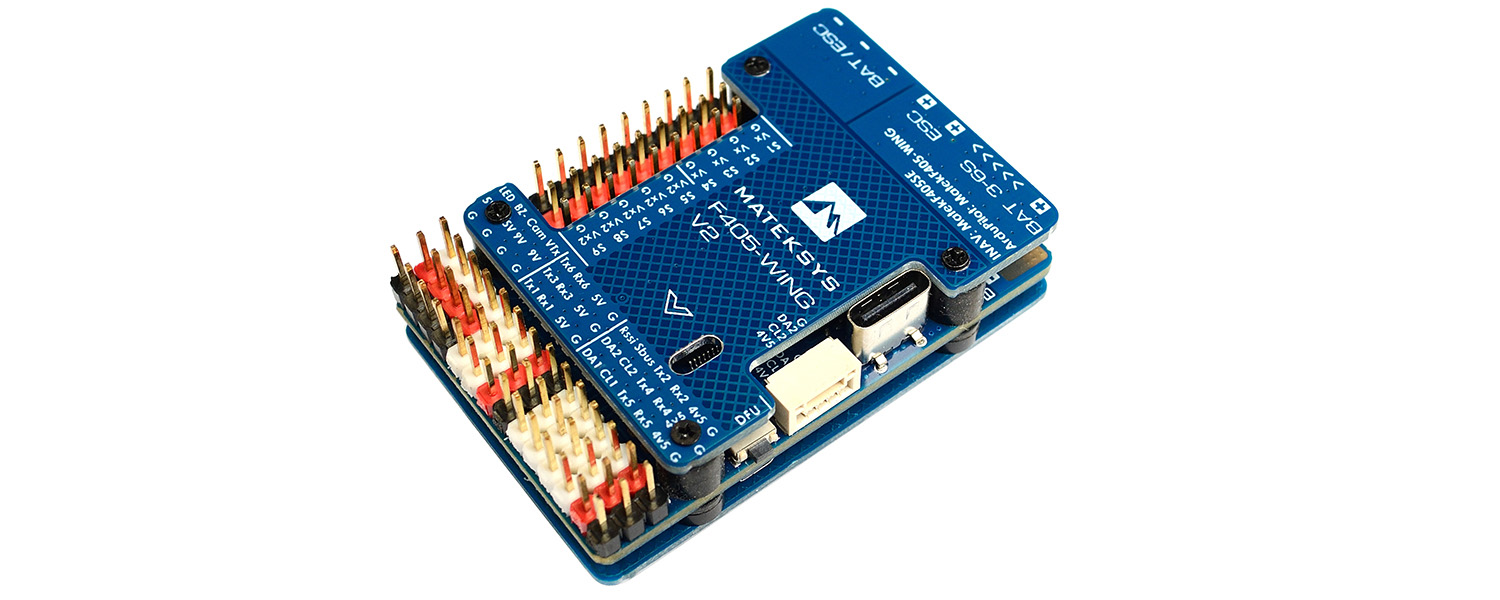
- Dupont 2.54 pins (Board is shipped unsoldered)
Layout
INAV mapping
INAV Tips:
- INAV firmware “MATEKF405SE” must be 6.0.0 or newer version.
- Current sensor scale 150
- 5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
- Softserial_tx1 is enabled on Tx2 pad by default for Frsky SmartPort telemetry. If using CRSF protocol receiver(TBS, ELRS etc), CPU based serial port(softserial) should be disable in INAV configurator.
- GPS / DJI OSD and other digital video systems / CRSF protocol receiver can work with anyyyyyyy spare UART_TX & RX.
- Airspeed sensor MS4525 works on I2C2 bus only.
| INAV | INAV MultiRotor | INAV Plane | |||
| PWM | S1 | 5 V tolerant I/O | TIM4_CH2 | Motor | Motor |
| S2 | 5 V tolerant I/O | TIM4_CH1 | Motor | Motor | |
| S3 | 5 V tolerant I/O | TIM3_CH3 | Motor | Servo | |
| S4 | 5 V tolerant I/O | TIM3_CH4 | Motor | Servo | |
| S5 | 5 V tolerant I/O | TIM8_CH3 | Motor | Servo | |
| S6 | 5 V tolerant I/O | TIM8_CH4 | Motor | Servo | |
| S7 | 5 V tolerant I/O | TIM12_CH1 | Motor, No DShot | Servo | |
| S8 | 5 V tolerant I/O | TIM12_CH2 | Motor, No DShot | Servo | |
| S9 | 5 V tolerant I/O | TIM1_CH1 | Servo | Servo | |
| LED | 5 V tolerant I/O | TIM2_CH1 | 2812LED | 2812LED | |
| ADC | Vbat ADC | 0~30V | ADC_CHANNEL_1 | scale 1100 | |
| current ADC | 0~3.3V | ADC_CHANNEL_2 | scale 150 (220A) | ||
| RSSI pad | 0~3.3V | ADC_CHANNEL_3 | Analog RSSI | ||
| I2C | I2C1 DA1, CL1 |
5V tolerant I/O | onboard Baro DPS310, Address 0x76 | ||
| OLED 0.96″ | |||||
| I2C2 DA2, CL2 |
5V tolerant I/O | I2C Magnetometer, Rangefinder, Temperature sensor | |||
| Digital Airspeed sensor MS4525 | |||||
| UART 5V tolerant I/O |
USB | USB | |||
| TX1 RX1 | 5V tolerant I/O | UART1 | USER | ||
| TX3 RX3 | UART3 | USER | |||
| TX4 RX4 | UART4 | USER | |||
| TX5 RX5 | UART5 | USER | |||
| TX6 RX6 | UART6 | USER | |||
| TX2 RX2 SBUS |
5V tolerant I/O | UART2 | RC input/Receiver | ||
| Sbus pad | for SBUS receiver, Sbus pad = RX2+inverter | ||||
| RX2 pad | IBUS/DSM | ||||
| TX2 & RX2 | CRSF | disable Softserial_Tx1 | |||
| TX2 pad | uninverted FPort (hacked) | disable Softserial_Tx1 | |||
| TX2 pad | SRXL2 | disable Softserial_Tx1 | |||
| TX2 pad | SmartPort Telemetry | enable Softserial_Tx1 | |||
ArduPilot mapping
ArduPilot Tips:
- ArduPlane firmware “MatekF405-WING” must be 4.4.0 or newer version.
- BATT_AMP_PERVLT 66.7
- Use 5V active buzzer on “Buz-” and 5V pads, Tone alarm is not supported.
- 5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
- non-inverted (hacked) S.Port signal is required for FPort or Smartport telemetry.
- If sending highspeed serial data (eg. 921600 baud) to the board, use USART1(Serial1) .
| ArduPilot | |||||
| PWM 5V tolerant I/O |
S1 | PWM1 GPIO50 | TIM4_CH2 | DMA/DShot | Group1 |
| S2 | PWM2 GPIO51 | TIM4_CH1 | DMA/DShot | ||
| S3 | PWM3 GPIO52 | TIM3_CH3 | DMA/DShot | Group2 | |
| S4 | PWM4 GPIO53 | TIM3_CH4 | DMA/DShot | ||
| S5 | PWM5 GPIO54 | TIM8_CH3 | DMA/DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | TIM8_CH4 | DMA/DShot | ||
| S7 | PWM7 GPIO56 | TIM1_CH2N | DMA/DShot | Gourp4 | |
| S8 | PWM8 GPIO57 | TIM1_CH3N | DMA/DShot | ||
| S9 | PWM9 GPIO58 | TIM1_CH1 | DMA/DShot | ||
| LED pad | PWM10 GPIO59 | TIM2_CH1 | DMA/DShot | Gourp5 | |
| SERVO10_FUNCTION 120, NTF_LED_TYPES neopixel | |||||
| Mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. If servo and motor are mixed in same group, make sure this group run lowest PWM frequency according to the servo specification. ie. Servo supports Max. 50Hz, ESC must run at 50Hz in this group. |
|||||
| ADC | Vbat ADC | onboard battery voltage | 1K:10K divider, 0~30V | BATT_MONITOR BATT_VOLT_PIN BATT_VOLT_MULT |
4 10 11.0 |
| current ADC | onboard current sense | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 66.7 |
|
| RSSI ADC | Analog RSSI | 0~3.3V | RSSI_ANA_PIN RSSI_TYPE |
15 2 |
|
| I2C | I2C1 DA1, CL1 |
5V tolerant I/O | onboard Baro DPS310 | Address | 0x76 |
| Digital Airspeed I2C | ARSPD_BUS | 0 | |||
| I2C2 DA2, CL2 |
5V tolerant I/O | Magnetometer | COMPASS_AUTODEC | 1 | |
| Digital Airspeed I2C | ARSPD_BUS | 1 | |||
| UART 5V tolerant I/O |
USB | USB | console | SERIAL0 | |
| TX1 RX1 | USART1 | with DMA | telem1 | SERIAL1 | |
| TX3 RX3 | USART3 | NO DMA | GPS1 | SERIAL3 | |
| TX4 RX4 | UART4 | NO DMA | GPS2 | SERIAL4 | |
| TX5 RX5 | UART5 | NO DMA | USER | SERIAL5 | |
| TX6 RX6 | USART6 | NO DMA | USER | SERIAL6 | |
| TX2 RX2 SBUS |
USART2 | NO DMA | RC input/Receiver | SERIAL7 | |
| RX2 | IBUS/DSM | BRD_ALT_CONFIG 0 Default |
|||
| Sbus pad | SBUS | ||||
| TX2 & RX2 | CRSF | BRD_ALT_CONFIG 1 SERIAL7_PROTOCOL 23 |
SERIAL7_OPTIONS 0 | ||
| TX2 | uninverted FPort (hacked) | SERIAL7_OPTIONS 4 | |||
| TX2 | SRXL2 | SERIAL7_OPTIONS 4 | |||
Difference from v1
| F405-WING V2 | F405-WING | |
| New layout | ||
| USB | USB Type-C | Micro USB |
| IMU | ICM42688P | MPU6000 |
| Baro | DPS310 | BMP280 |
| Current sensor | 100A continuous, 220A Peak | 60A continuous, 104A Peak |
| Current scale | INAV 150 ArduPilot BATT_AMP_PERVLT= 66.7 |
INAV 317 ArduPilot BATT_AMP_PERVLT= 31.5 |
| Size | 54 * 36 * 13mm | 56 * 36 * 13mm |
| INAV | MatekF405SE, 6.0 or newer | MatekF405SE |
| ArduPilot | MatekF405-Wing, 4.4 or newer | MatekF405-Wing |