Flight Controller F405-WSE
STM32F405RGT6, MPU6000, DPS310, OSD, SD Blackbox, 10x PWM outputs, 6x UARTs, 2xI2C

Gallery

Spec.& Manual
F405-WSE Quick Start Guide (PDF)
FC Specifications
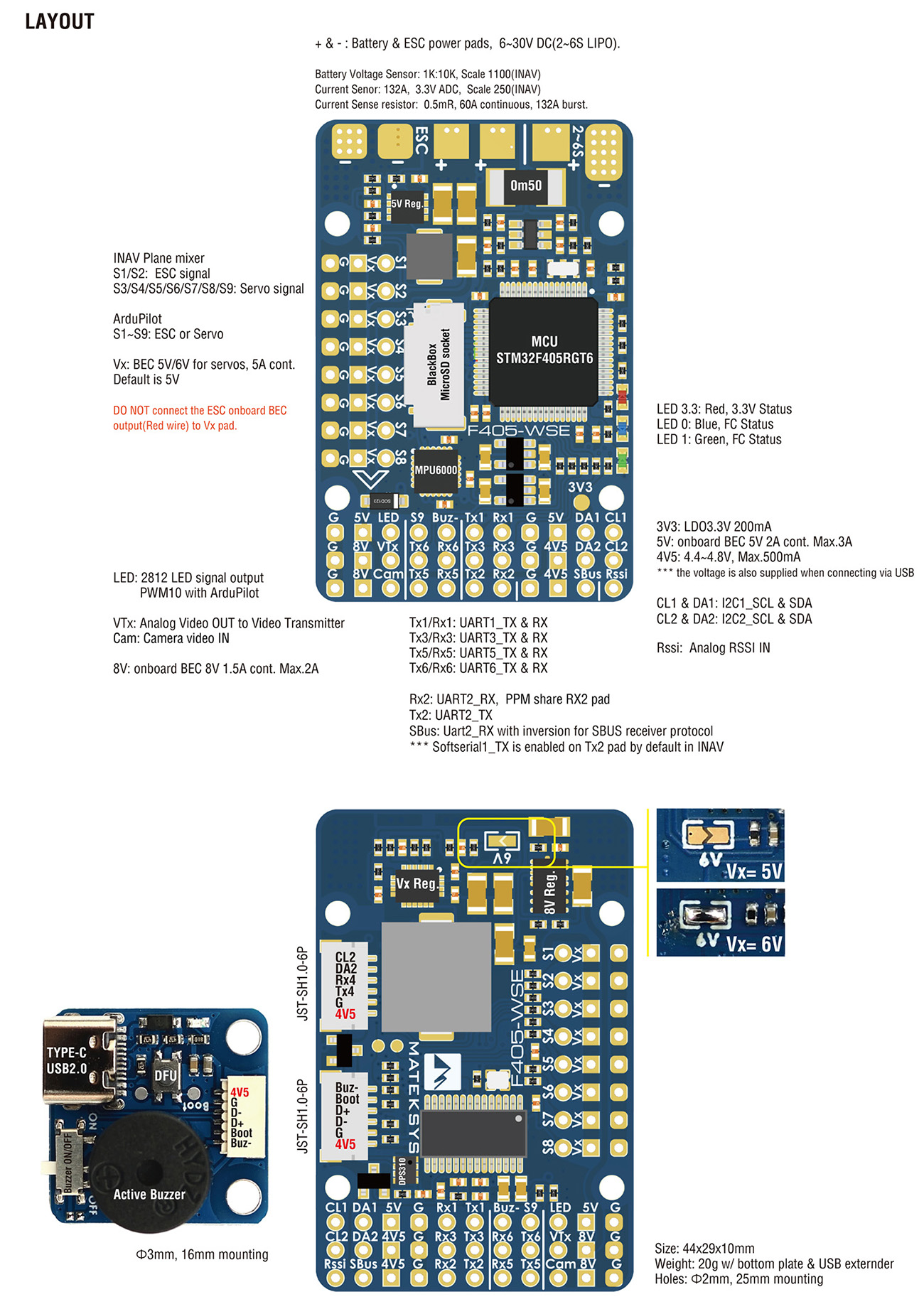
- MCU: 168MHz STM32F405RGT6 1MB Flash
- IMU: MPU6000 (SPI1)
- Baro: DPS310 (I2C1)
- OSD: AT7456E (SPI2)
- Blackbox: MicroSD socket (SPI3)
- VCP & 6x UARTs,
- 1x Softserial_Tx option (TX2 pad, INAV)
- 10x PWM outputs(S1~S9, LED)
- 2x I2C
- 3x ADC (voltage, current, RSSI)
- 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
- Built in inverter on UART2-RX for SBUS input
- PPM/UART Shared: UART2-RX
- 1x SH1.0_6pin connector (4V5/G/TX4/RX4/DA2/CL2) for GPS/compass
- 1x SH1.0_6pin connector for external USB and buzzer
- DJI FPV OSD: any spare UART
- FrskyOSD: any spare UART
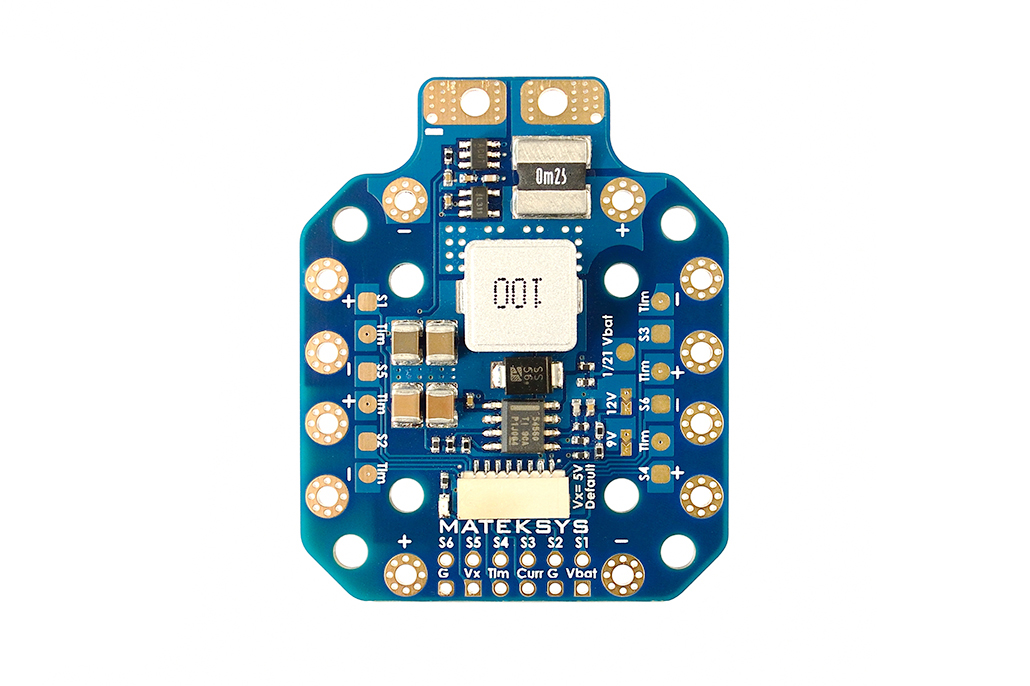
Power
- 6~30V DC IN (2~6S LiPo)
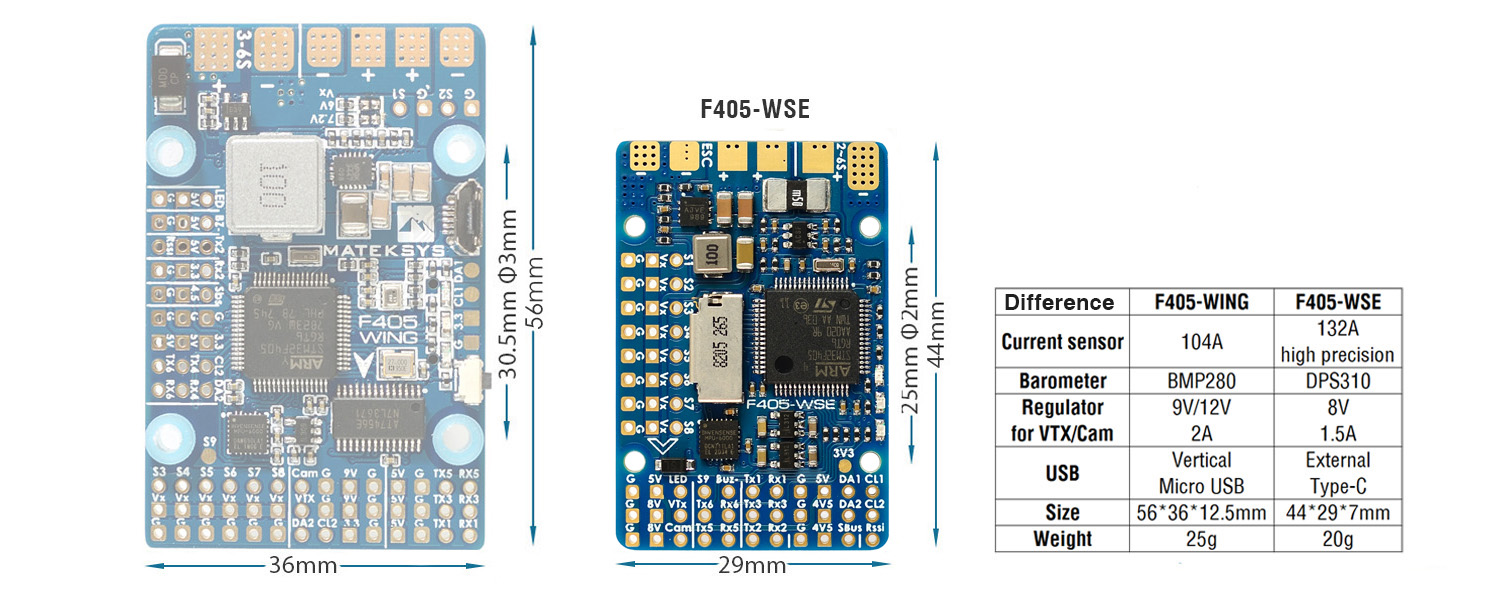
- 132A high-precision Current Sense (Scale 250)
- PDB/Current sense resistor: 60A continuous, 132A burst.
- BEC 5V 2A for FC & Peripherals
- BEC Vx 5A for servos, 5V/ 6V option
- BEC 8V 1.5A for VTX and camera
- LDO 3.3V 200mA
- Battery Voltage Sensor: 1k:10k
FC Firmware
- INAV Target: MATEKF405SE
- ArduPilot hwdef: MATEKF405WING
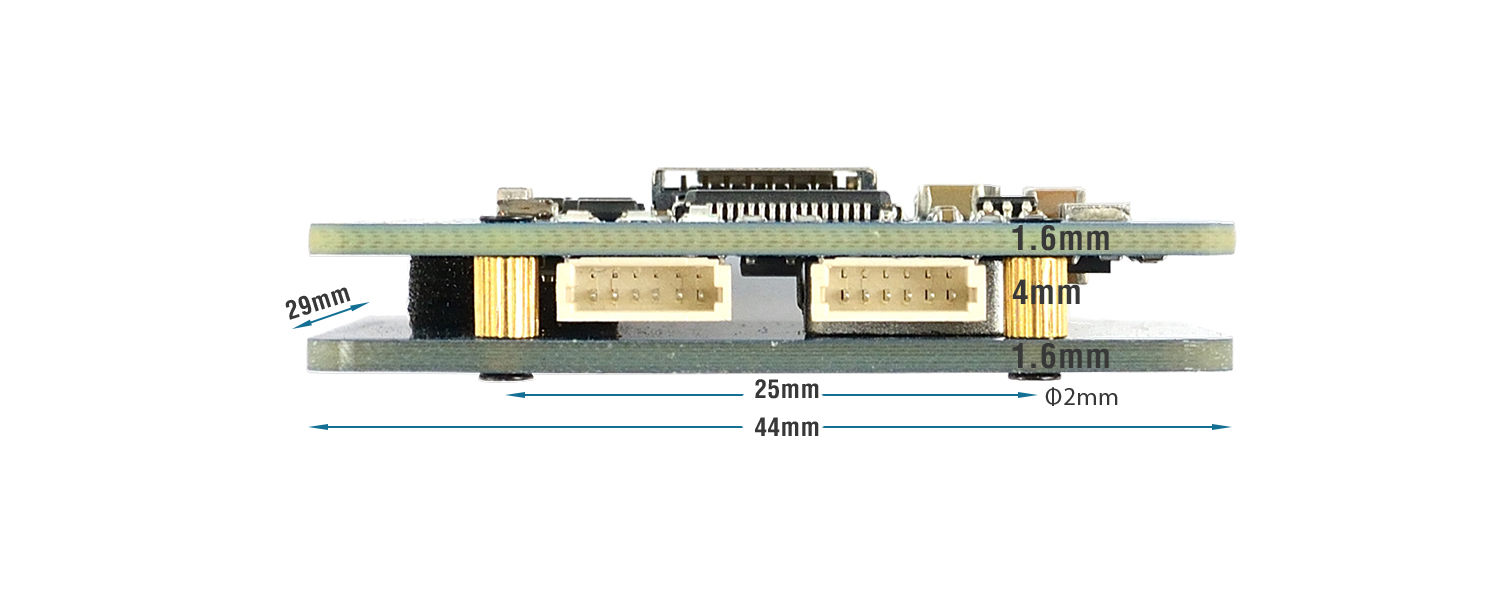
Physical
- Dimensions: 44 x 29 x 10 mm
- Mounting: 25 x 25mm, Φ2mm
- Weight: 20g w/ bottom plate and USB/buzzer adapter
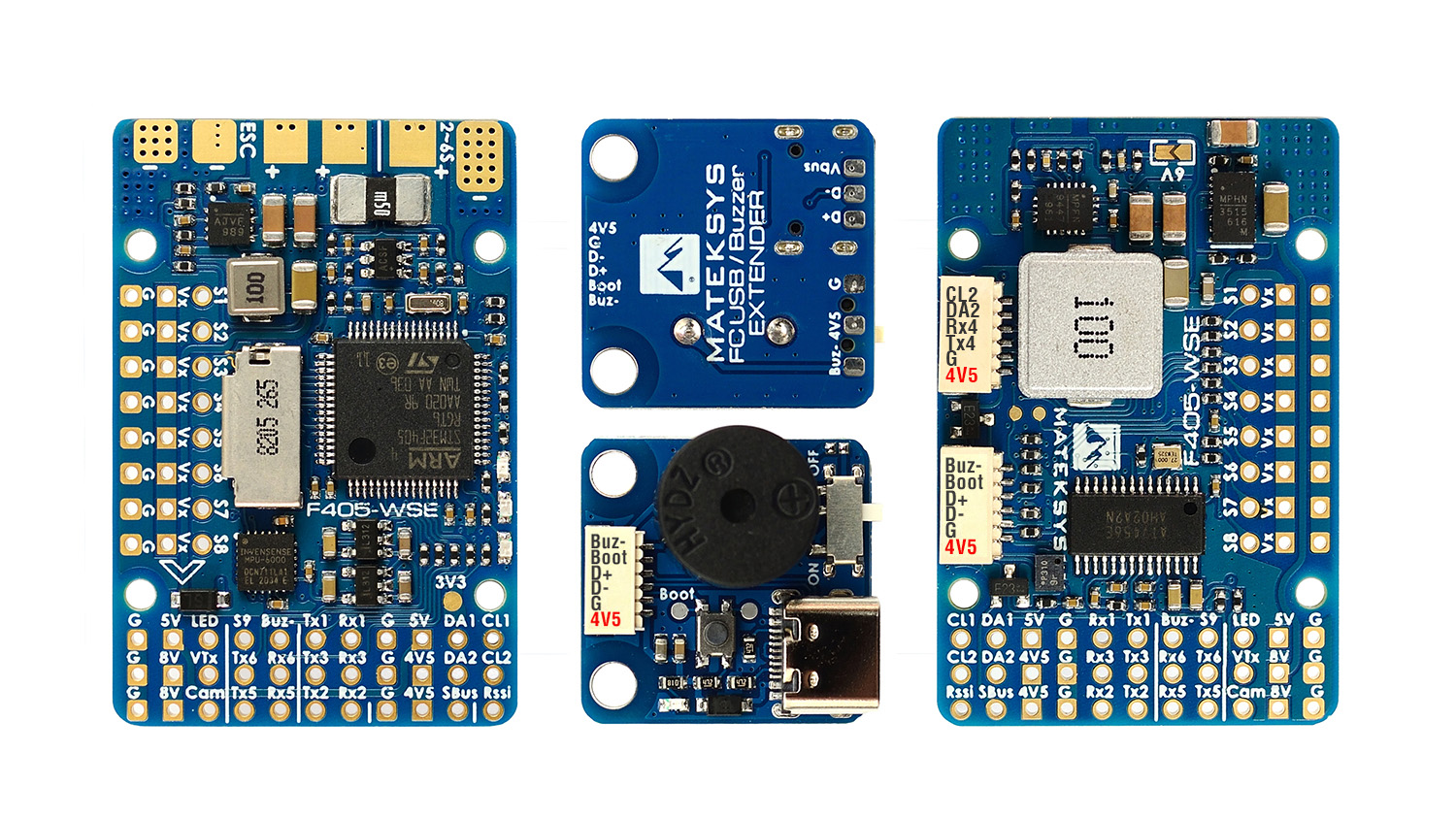
Including
- 1x FC F405-WSE
- 1x USB(Type-C)/Buzzer (Active) Adapter
- 1x Bottom plate, 44 x 29mm
- 2x JST-SH-6P to JST-SH-6P cables, 20cm
- 5x Brass standoffs, M2*4mm
- 10x screws, M2*3.5mm
- Dupont 2.54 pins (Board is shipped unsoldered)
Layout
INAV Wiring
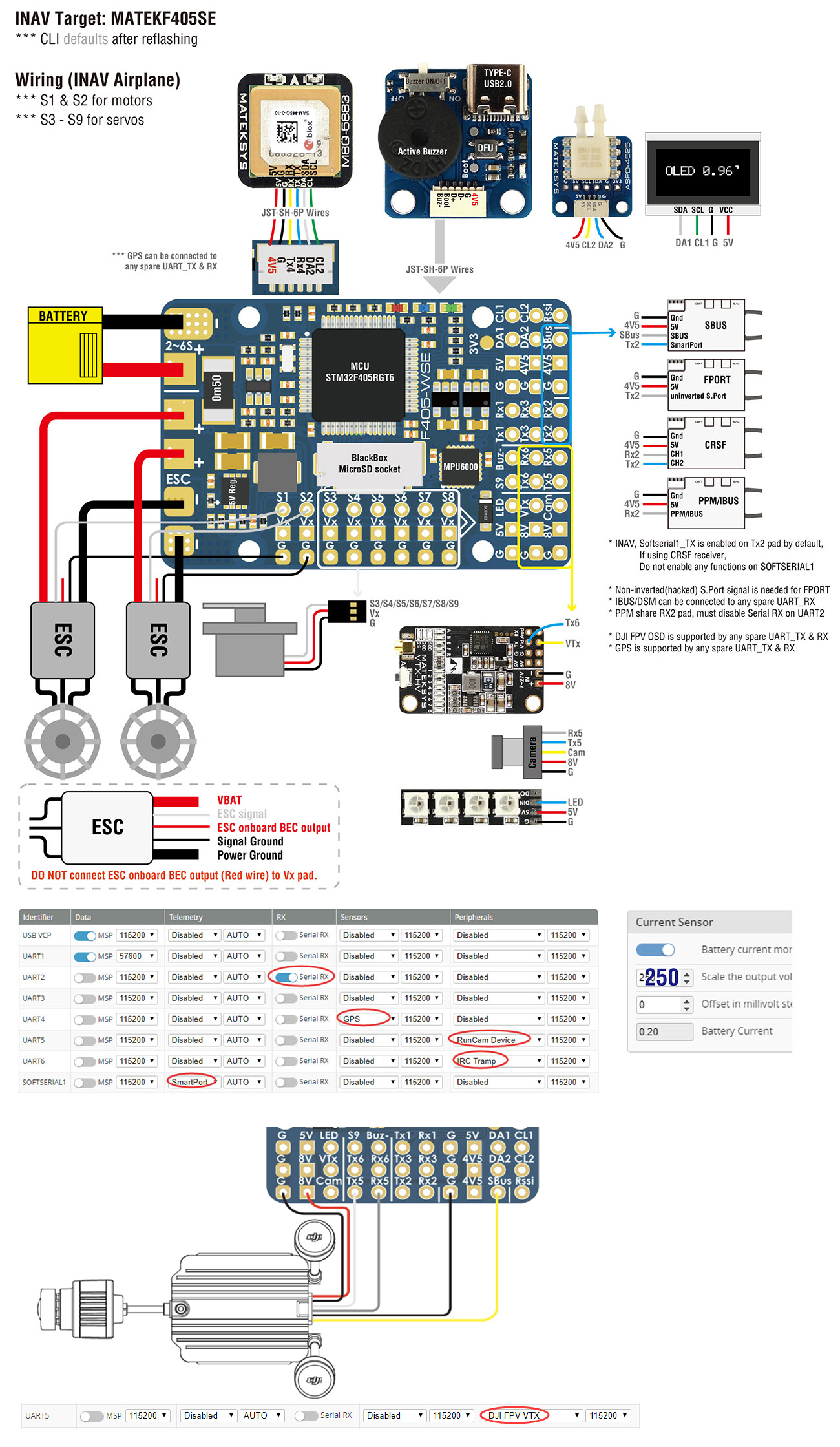
INAV mapping
| PWM | Pad | PIN Name | TIM | INAV Multi-Rotor | INAV Plane | |
| S1 | PB7 | TIM4_CH2 | Motor | Motor | ||
| S2 | PB6 | TIM4_CH1 | Motor | Motor | ||
| S3 | PB0 | TIM3_CH3 | Motor | Servo | ||
| S4 | PB1 | TIM3_CH4 | Motor | Servo | ||
| S5 | PC8 | TIM8_CH3 | Motor | Servo | ||
| S6 | PC9 | TIM8_CH4 | Motor | Servo | ||
| S7 | PB14 | TIM12_CH1 | Servo | Servo | ||
| S8 | PB15 | TIM12_CH2 | Servo | Servo | ||
| S9 | PA8 | TIM1_CH1 | Servo | Servo | ||
| LED | PA15 | TIM2_CH1 | 2812LED | 2812LED |
| ADC | No pad 1K:10K divider builtin 6~30V input |
on board battery voltage | INAV Scale 1100 BataFlight Scale 110 |
| No pad 0~3.3V |
on board current sensor | Sacle 250 | |
| RSSI Pad 0~3.3V |
Analog RSSI | ||
| I2C | DA2 CL2 | I2C2 | Magnetometer (HMC5883 /MAG3110 /QMC5883 /IST8310) |
| DA2 CL2 | I2C2 | AirSpeed (MS4525) | |
| DA1 CL1 | I2C1 | OLED 0.96″ | |
| DA1 CL1 | I2C1 | on board Barometer DPS310 | |
| UART | TX1 RX1 | UART1 | Spare |
| TX2 RX2 | UART2 | Receiver (CrossFire) | |
| RX2 | UART2 | Receiver (IBUS, Spektrum DSM/SRXL , SUMD) | |
| RX2 | Receiver PPM (disable Serial RX on UART2) | ||
| Sbus | UART2 | Receiver SBUS, Built-in inverter on UART2-RX | |
| TX2 | Softserial1_TX | Frsky SmartPort | |
| TX3 RX3 | UART3 | Spare | |
| TX4 RX4 | UART4 | GPS | |
| TX5 RX5 | UART5 | Spare | |
| TX6 RX6 | UART6 | Spare | |
ArduPilot mapping
| PWM
S1~S9 & LED are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. If servo and motor are mixed in same group, make sure this group run lowest PWM frequency according to the servo specification. ie. Servo supports Max. 50Hz, ESC must run at 50Hz in this group. |
S1 | PWM1 GPIO50 | TIM4_CH2 | Group1 |
| S2 | PWM2 GPIO51 | TIM4_CH1 | ||
| S3 | PWM3 GPIO52 | TIM3_CH3 | Group2 | |
| S4 | PWM4 GPIO53 | TIM3_CH4 | ||
| S5 | PWM5 GPIO54 | TIM8_CH3 | Gourp3 | |
| S6 | PWM6 GPIO55 | TIM8_CH4 | ||
| S7 | PWM7 GPIO56 | TIM1_CH2N | Gourp4 | |
| S8 | PWM8 GPIO57 | TIM1_CH3N | ||
| S9 | PWM9 GPIO58 | TIM1_CH1 | ||
| LED | PWM10 GPIO59 | TIM2_CH1 | Gourp5 | |
| SERVO10_FUNCTION 120, NTF_LED_TYPES neopixel | ||||
| ADC | No pad 1K:10K divider builtin 6~30V input |
on board battery voltage | BATT_VOLT_PIN BATT_VOLT_MULT |
10 11.0 |
| No pad 0~3.3V |
on board current sensor | BATT_CURR_PIN BATT_AMP_PERVLT |
11 40 |
|
| RSSI Pad 0~3.3V |
RSSI ADC Analog RSSI |
RSSI_ANA_PIN RSSI_TYPE |
15 2 |
|
| I2C | I2C2 | Digital Airspeed I2C | ARSPD_BUS ARSPD_PIN |
1 65 |
| MS4525 MS5525 DLVR-L10D |
ARSPD_TYPE | 1 3 9 |
||
| I2C2 | Compass | COMPASS_AUTODEC | 1 | |
| I2C1 | on board Baro DPS310 | |||
| UART | USB | USB | console | SERIAL0 |
| TX1 RX1 | USART1 | telem1 | SERIAL1 | |
| TX2 RX2, SBUS | USART2 | RC input/Receiver | SERIAL7 | |
| TX3 RX3 | USART3 | GPS1 * | SERIAL3 | |
| TX4 RX4 | UART4 | GPS2 * | SERIAL4 | |
| TX5 RX5 | UART5 | USER | SERIAL5 | |
| TX6 RX6 | USART6 | USER | SERIAL6 | |
- * If connecting just one GPS to UART4(TX4/RX4), pls set SERIAL3_PROTOCOL -1 or non “5”. otherwise ArduPilot will stop searching for GPS during bootup if not found on the first port configured for GPS protocol.
- UART4/Serial4, UART5/Serial5, USART6/Serial6 have no DMA on RX (TX always DMA). If sending highspeed serial data (eg. 921600 baud) to the board, use Serial1/Serial3.
Frsky Smartport Telemetry
- non-inverted (hacked) S.Port signal
- any spare Uart_TX
- SERIALx_BAUD 57
- SERIALx_OPTIONS 7
- SERIALx_PROTOCOL 4 or 10(for yaapu)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
- OSD_TYPE = 3
- SERIALx_PROTOCOL = 33
- MSP_OPTIONS = 0 (polling mode)
CRSF
- If using CRSF receiver on this FC with ardupilot firmware, pls use Serial1/USART1 which has DMA enabled.
- serial1_protocol = 23
- RC_OPTIONS = [current value] + 256 (for yaapu tlm)
Notes & Tips
- F405-WSE has INAV firmware preloaded for QC
- INAV2.5.x downloaded from configurator doesn’t support new barometer DPS310. Pls use INAV firmware 2.6.x & new configurator.
- ArduPilot Firmware “MATEKF405-WING″ supported the onboard barometer DPS310 since Plane-4.0.6 & Copter-4.0.4
- If connecting just one GPS to UART4(TX4/RX4), pls set SERIAL3_PROTOCOL -1 or non “5”. otherwise ArduPilot will stop searching for GPS during bootup if not found on the first port(Serial3) configured for GPS protocol.
Resellers
It is on the way to more resellers. Including but not limited to
- Air-Hobby (Russia)
- FlyMod.net (Ukraine)
- www.fpv1.de (Germany)
- HobbyRC.co.uk (UK)
- PhaserFPV (Australia)
- PyroDrone (US)
- RaceDayQuads (US)
- rcmaniak.pl (Poland)
- RCModels.com.ua (Ukraine)
- rc-innovations.es (Spain)
- Rotorgeeks (CA)