NOTIFICATION
It has recently come to our attention that counterfeit CAN-L4-BM products are circulating in the market.
Please purchase our products from authorized dealers https://www.mateksys.com/?page_id=1212
Tips
Due to limitations by AP_Periph firmware, the fw AP_Periph V1.7.0 and older do not support current readings greater than 90A. You can update the fw to latest. then set AP_Periph parameters BATT_MAX_AMPS = 204.8 and BATT_SHUNT = 0.0002.
https://github.com/ArduPilot/ardupilot/pull/26465
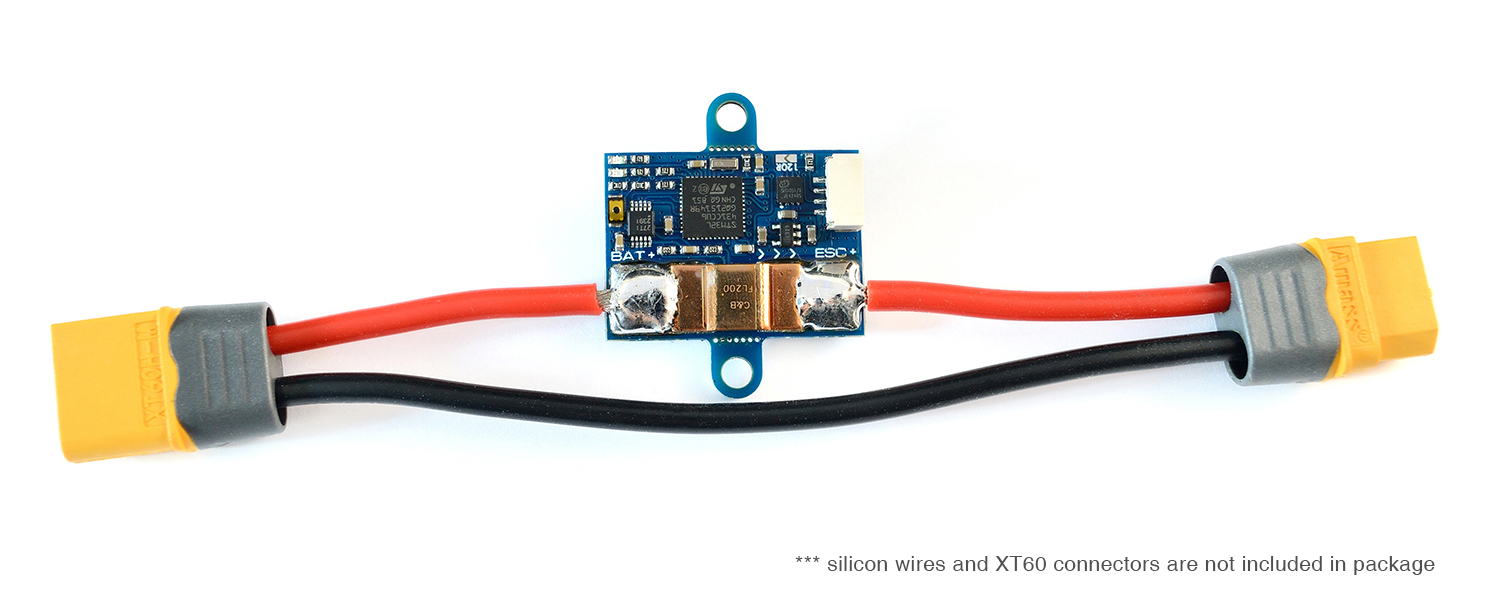
Gallery
Specifications
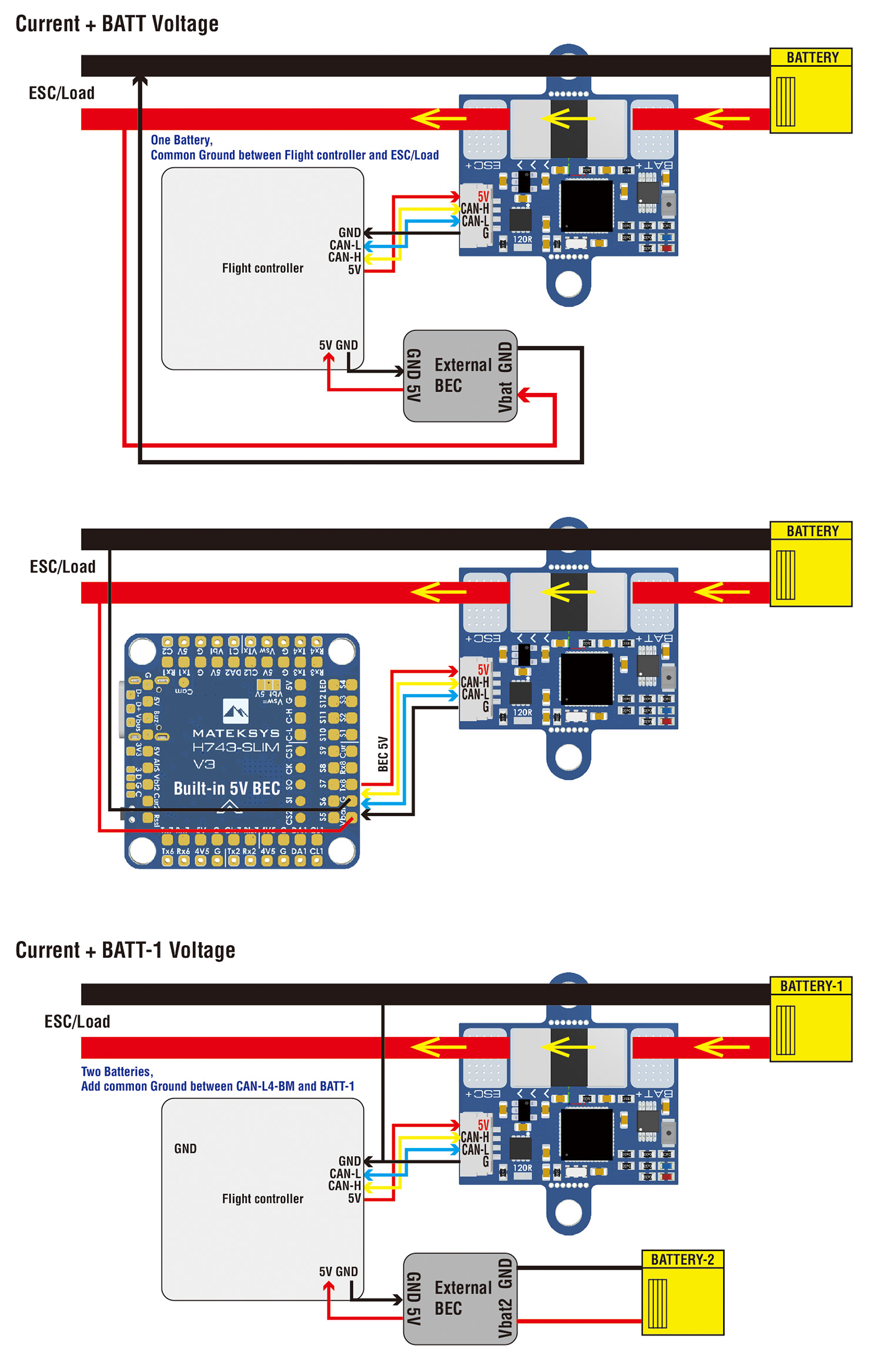
Wiring